
《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘
视频讲解
第1季:第6章_机器人底盘
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
——(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)——







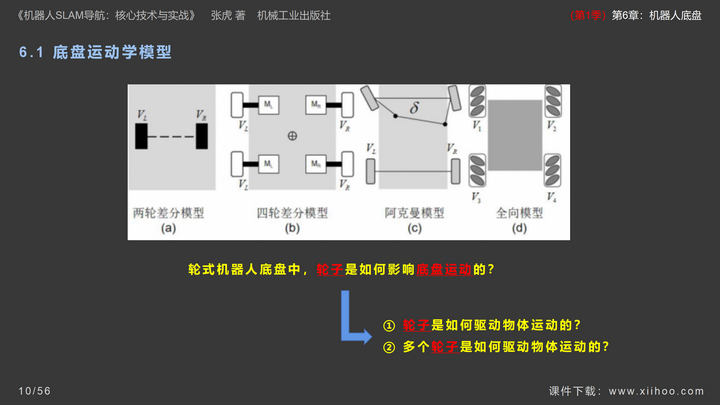
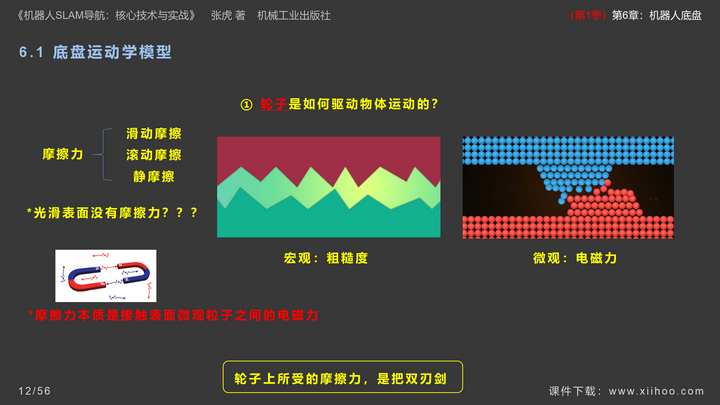
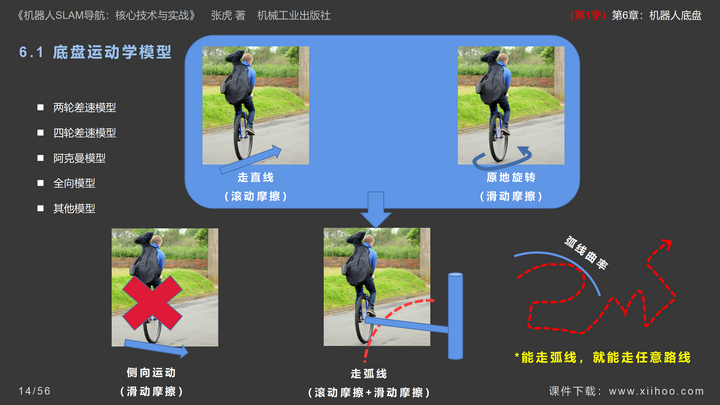
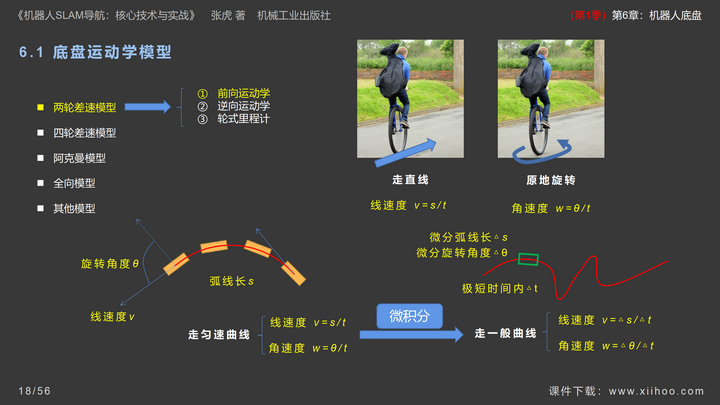
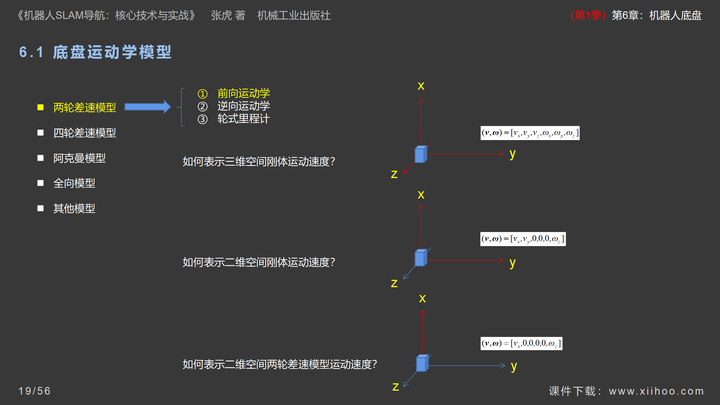
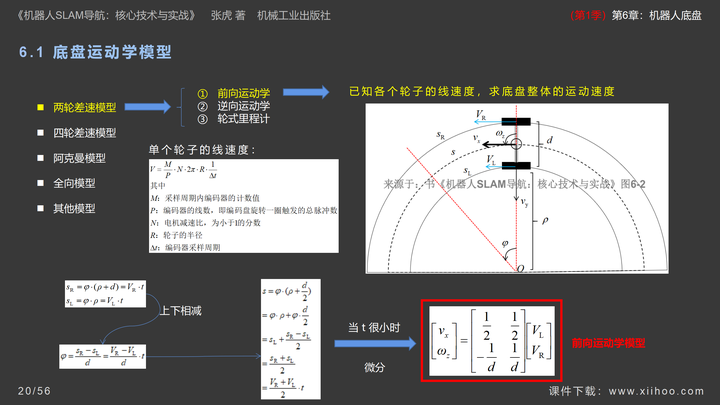
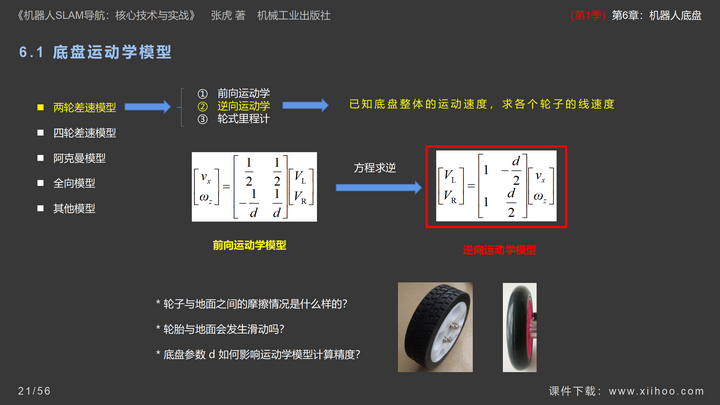
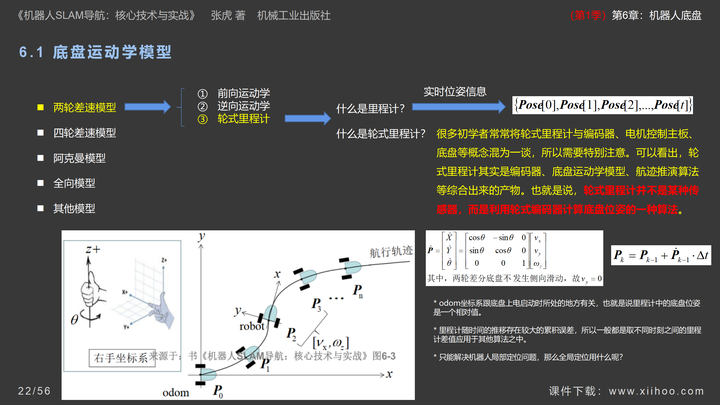
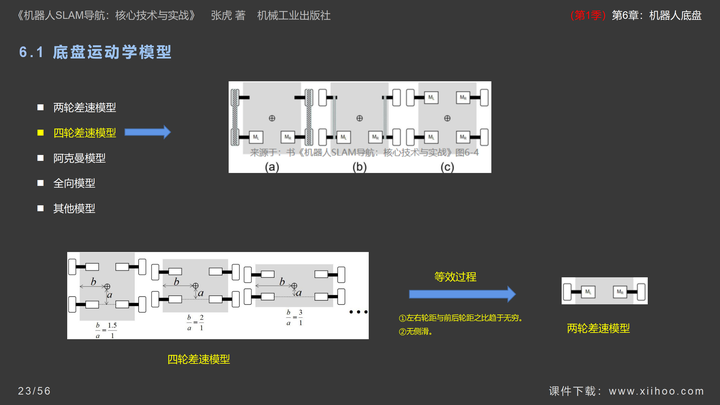
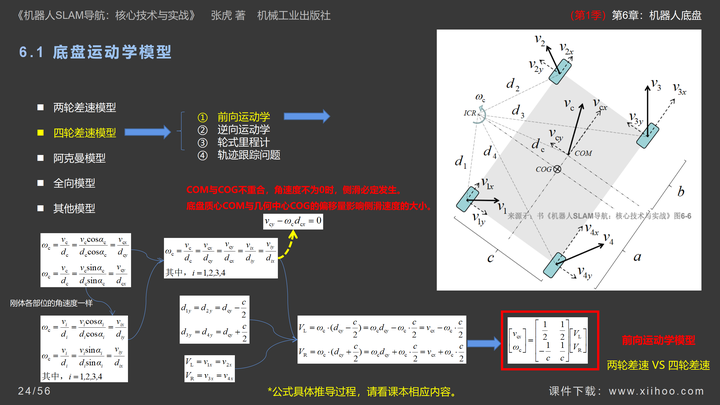
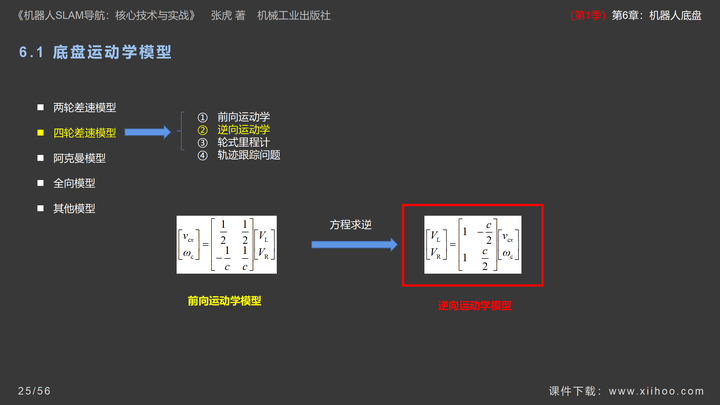
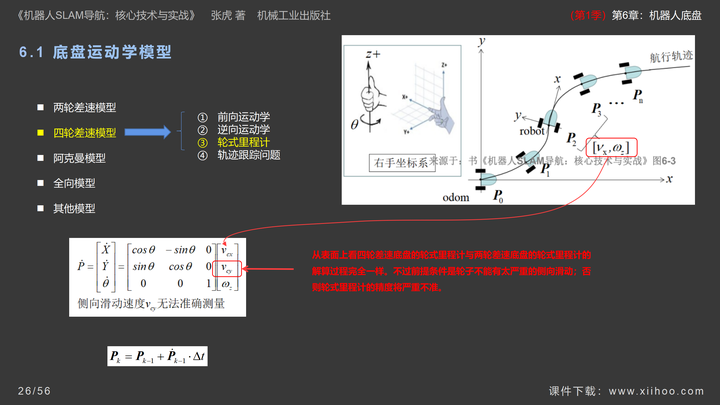
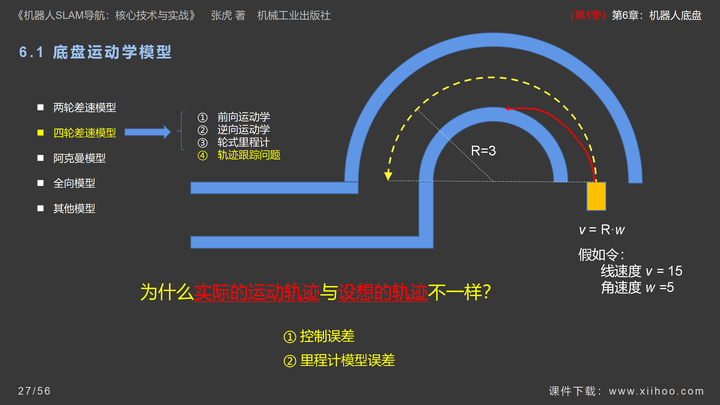
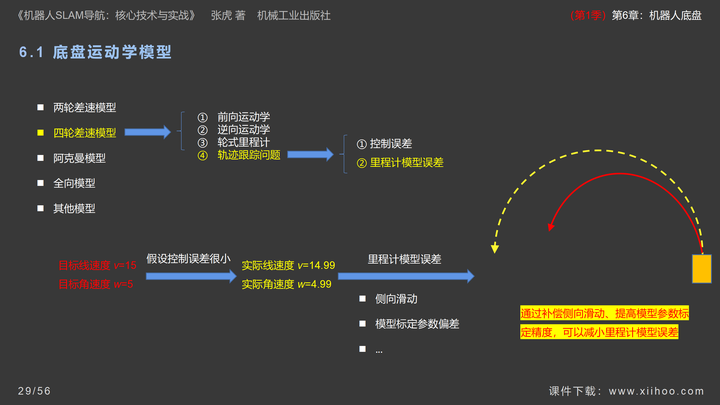
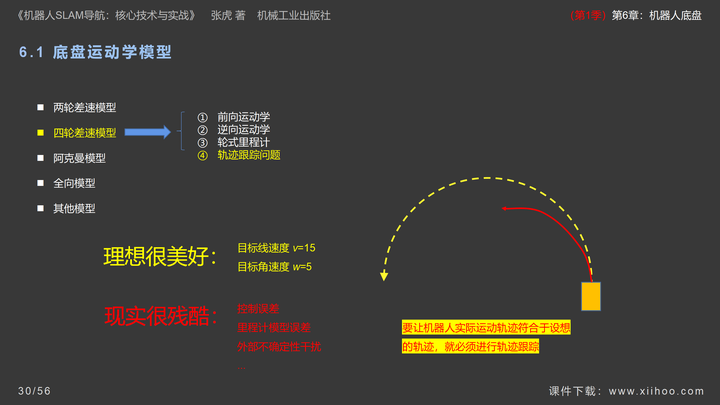
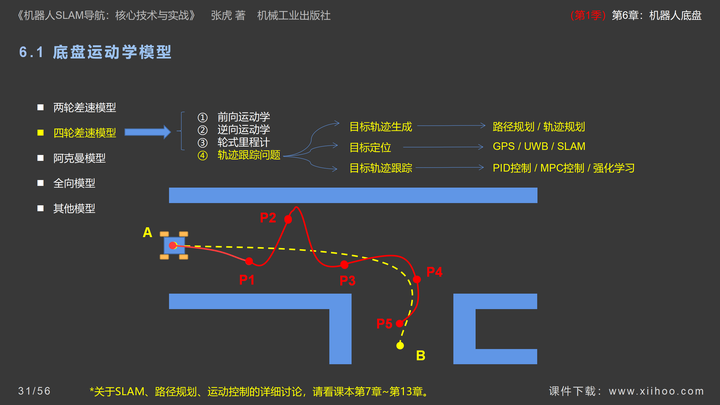
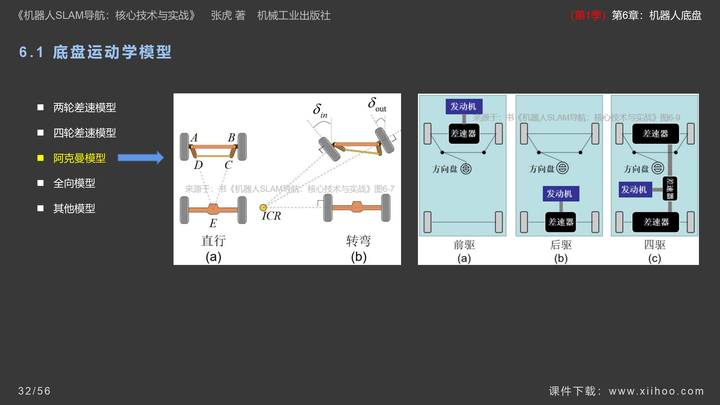
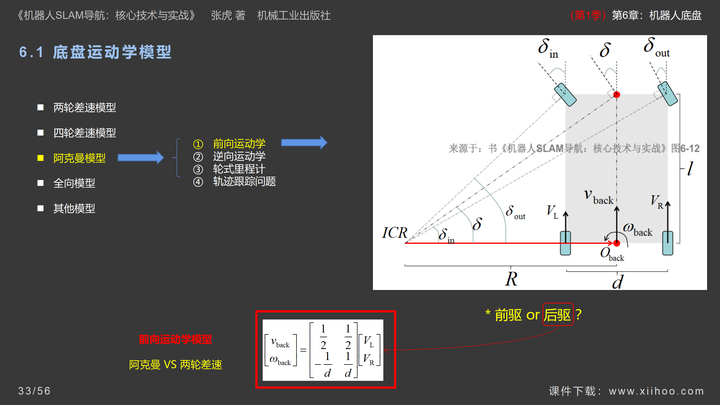
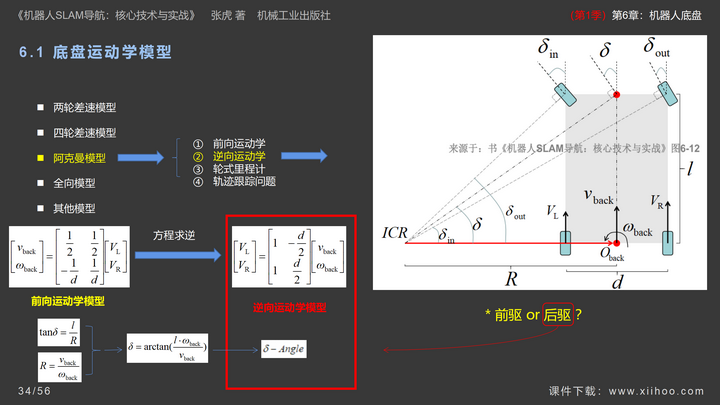
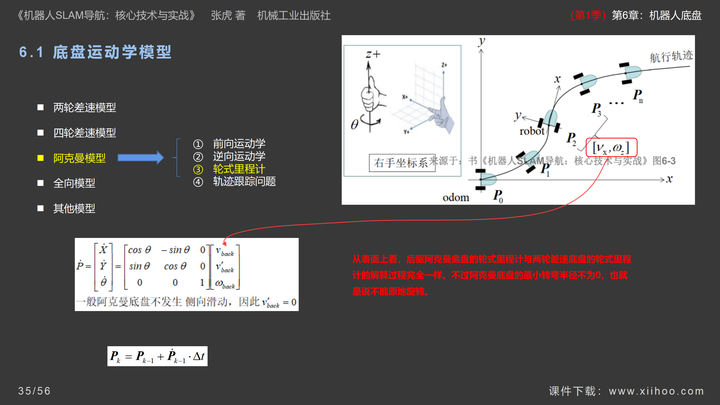
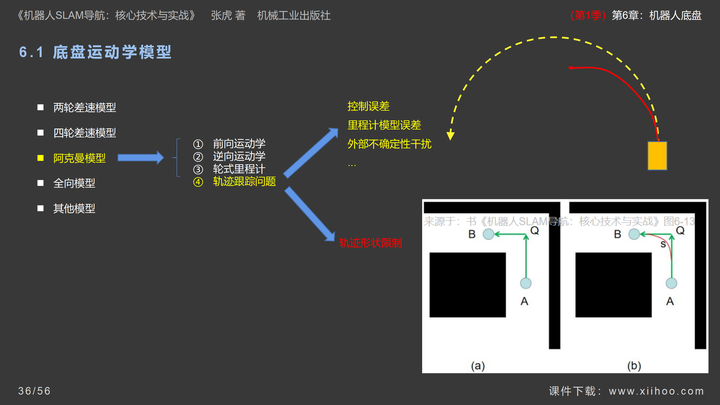
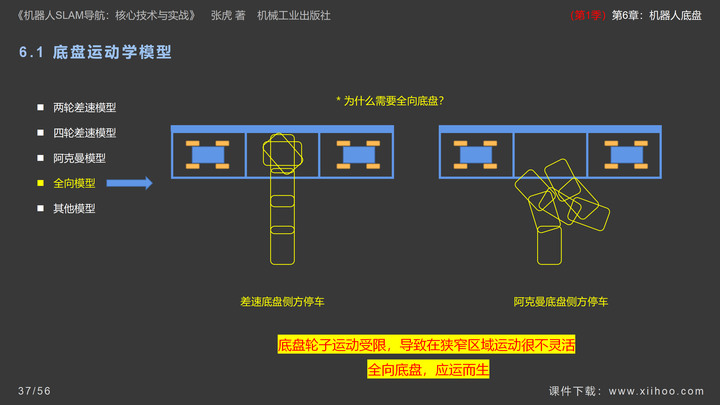
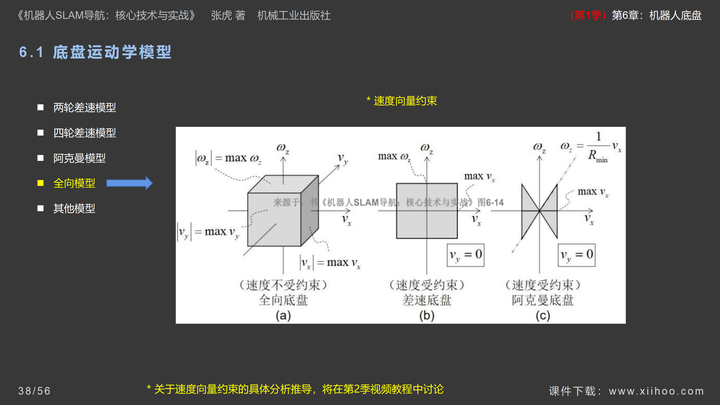
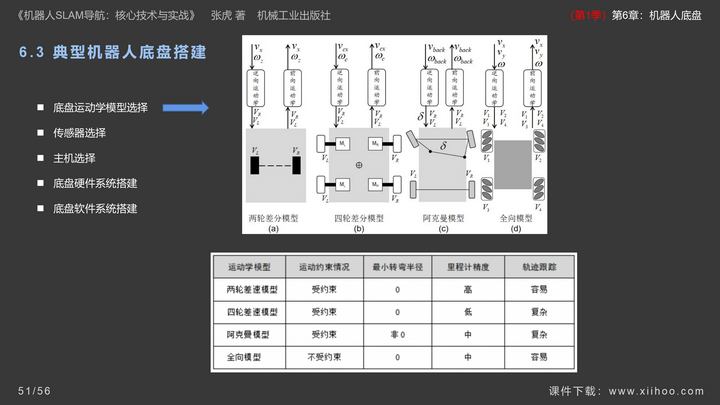
6.1 底盘运动学模型
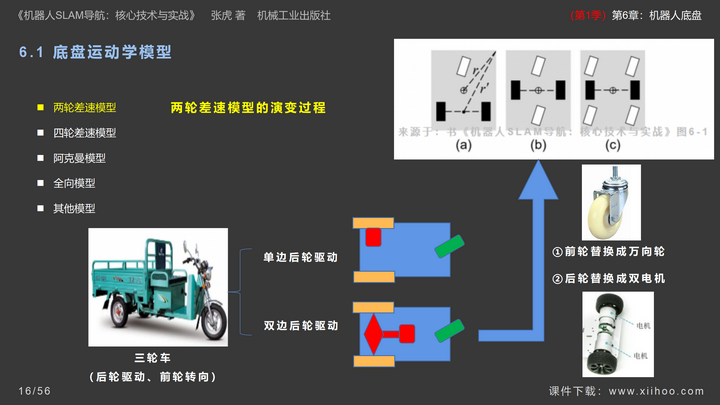
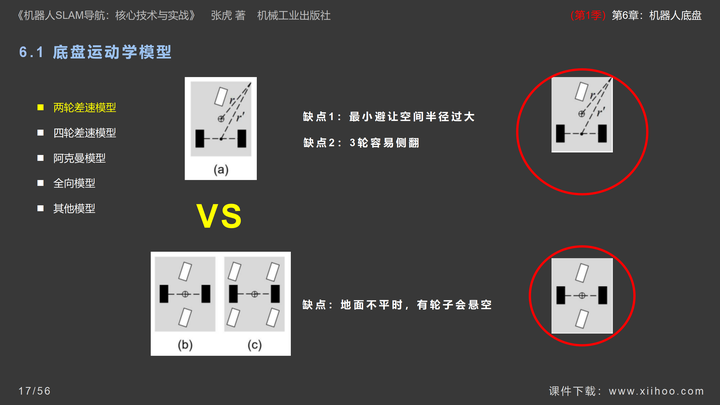
①两轮差速模型
②四轮差速模型
③阿克曼模型
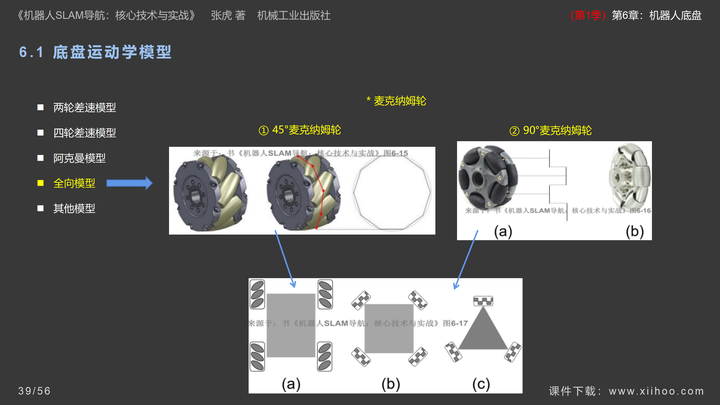
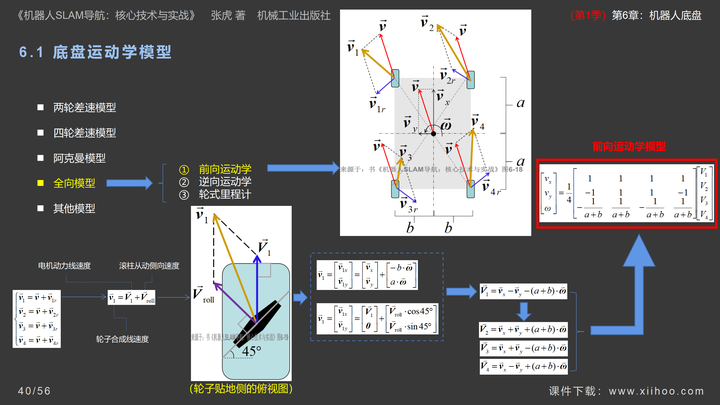
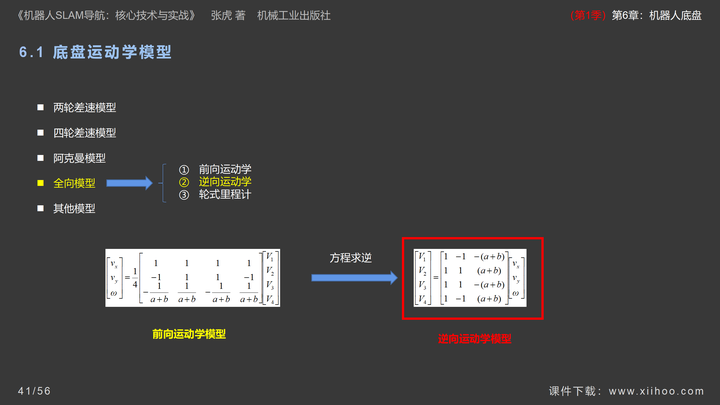
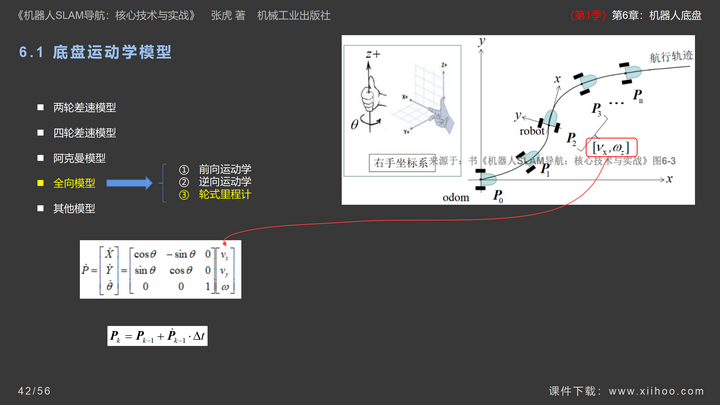
④全向模型
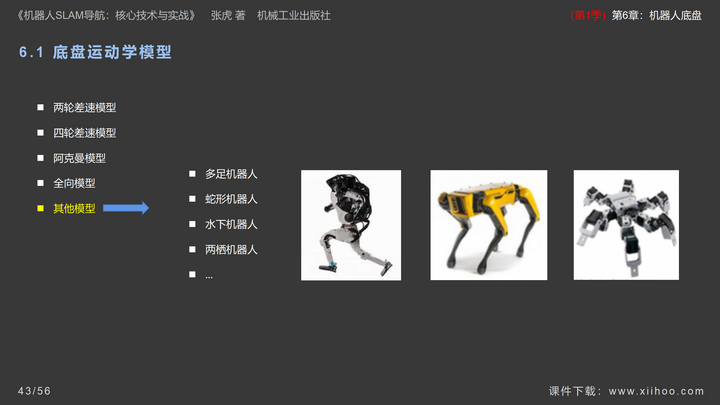
⑤其他模型




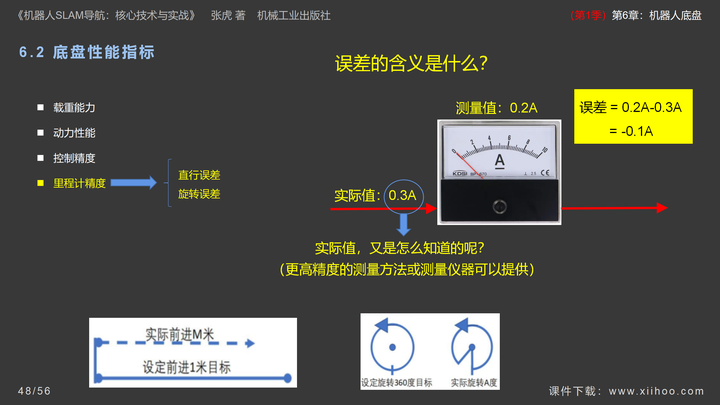
6.2 底盘性能指标
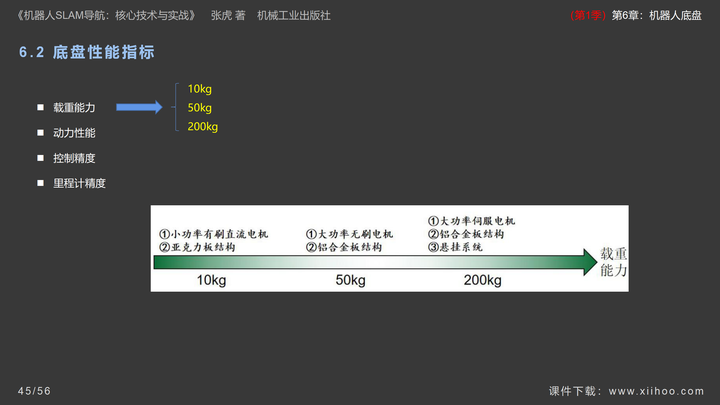
①载重能力
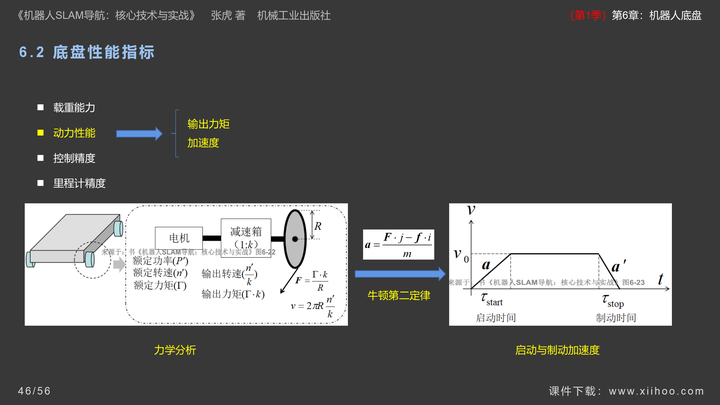
②动力性能
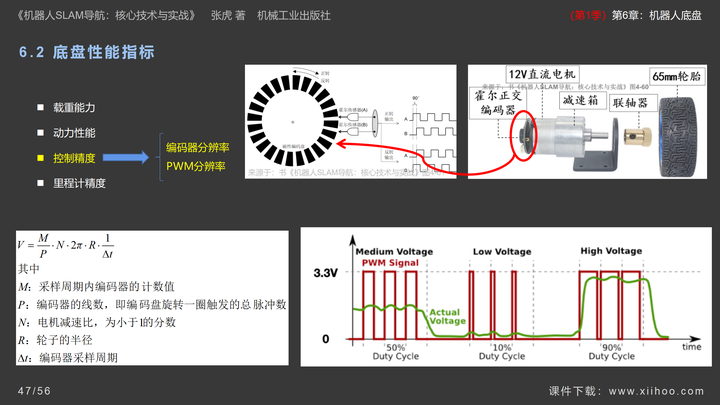
③控制精度
④里程计精度
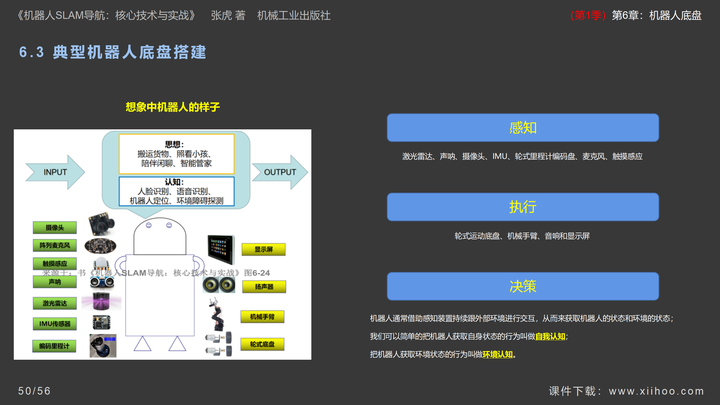
6.3 典型机器人底盘搭建
①底盘运动学模型选择
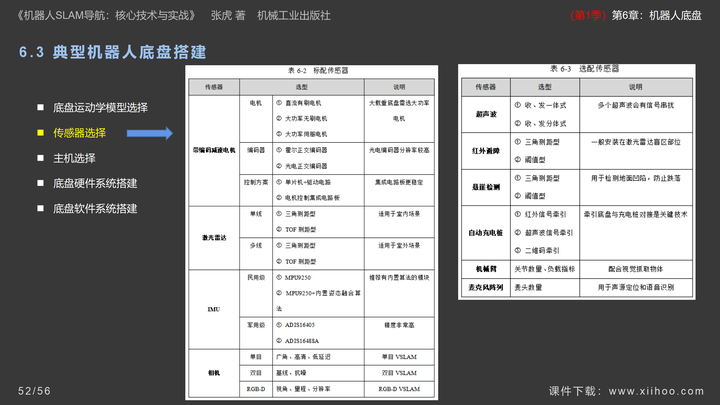
②传感器选择
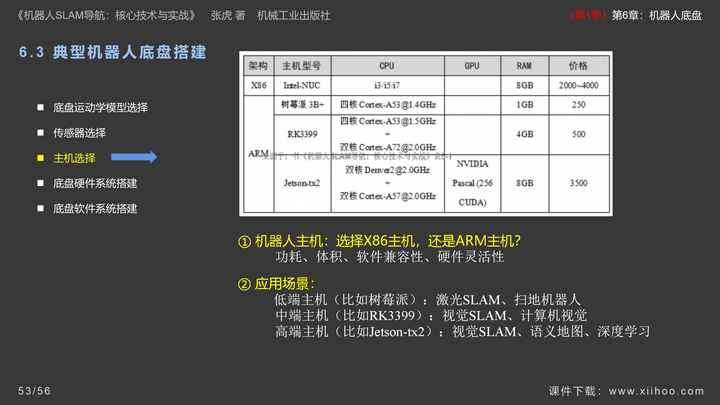
③主机选择
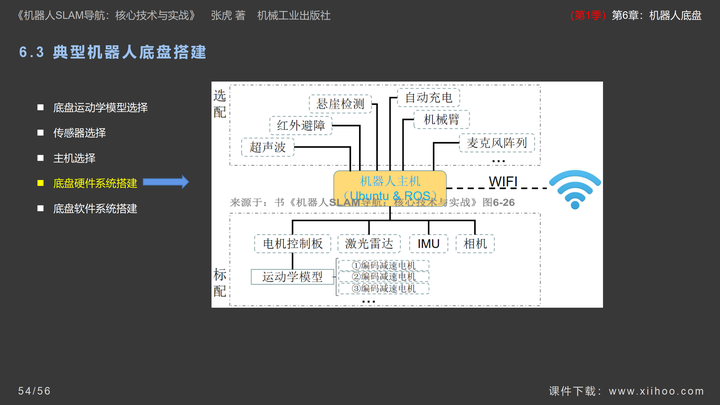
④底盘硬件系统搭建
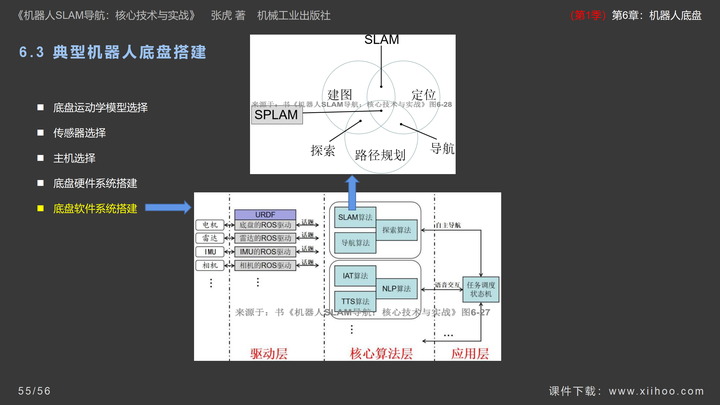
⑤底盘软件系统搭建
例程源码下载
-
Github下载:
-
Gitee下载(国内访问速度快):
课件下载
PPT课件下载:
PDF课件下载:
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
相关推荐: GPT虚拟直播Demo系列(二)|无人直播间实现虚拟人回复粉丝
摘要 虚拟人和数字人是人工智能技术在现实生活中的具体应用,它们可以为人们的生活和工作带来便利和创新。在直播间场景里,虚拟人和数字人可用于直播主播、智能客服、营销推广等。接入GPT的虚拟人像是加了超强buff,具备更强大的自然语言处理能力和智能对话能力,可以实现…
