
文章代码 laugh12321/RoadLaneFitting 欢迎star ✨
将前视图转为鸟瞰图
将前视图转为鸟瞰图的方法有两种:
- 有标定的情况下,可以直接使用标定参数进行转换。
- 没有标定的情况下,可以选择四个点计算透视变换矩阵来进行转换。
在没有标定的情况下,透视变换需要使用一个3×3的变换矩阵,确保直线在变换后仍然保持直线的性质。为了得到这个变换矩阵,需要在输入图像上选择4个点,并提供它们在输出图像上的对应点。这4个点中,至少有3个点不能共线。通过使用cv2.getPerspectiveTransform函数,可以计算出这个变换矩阵,随后可以通过cv2.warpPerspective将其应用于图像。
简而言之,透视变换需要选取4个非共线的点,并通过这些点之间的映射关系来计算变换矩阵,最终应用于图像。
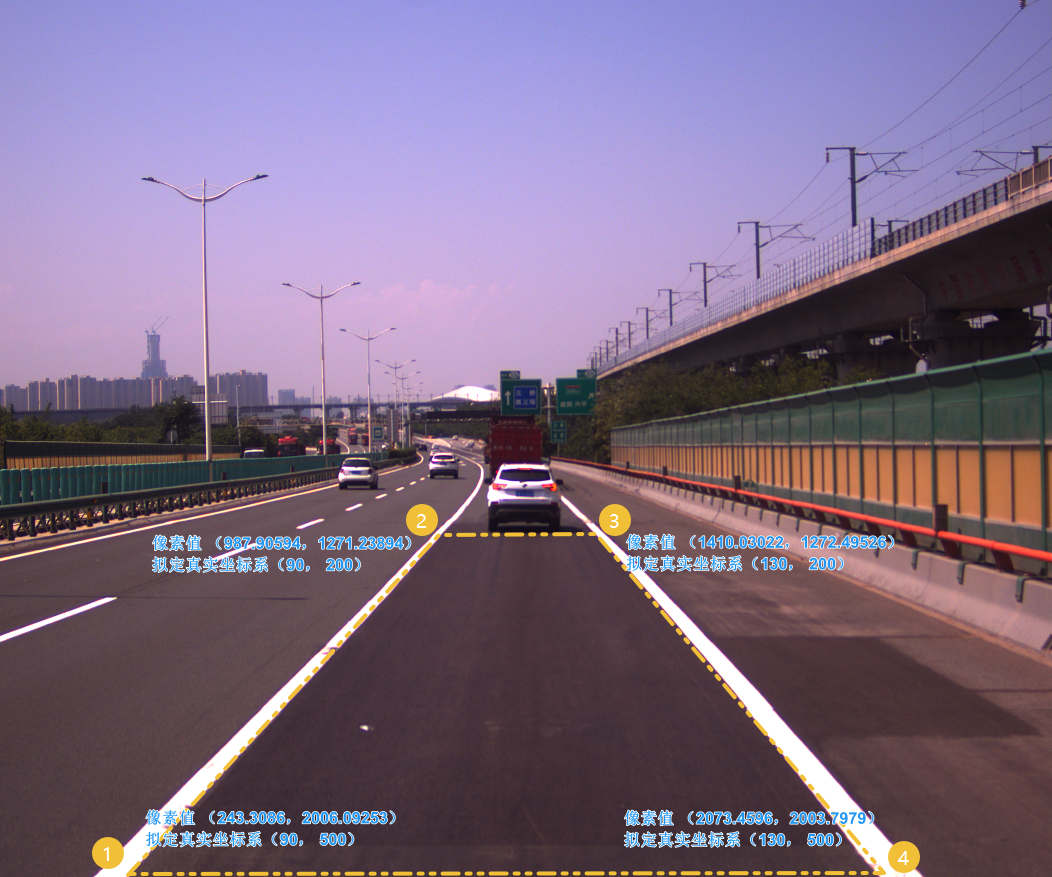
以上图为例,选择1,2,3,4四个点,用以进行透视变换。经查阅,高速公路上的白色虚线标准长度为长度6米,间隔9米。高速公路单条车道宽度是3.75米。这里假定,直线14,直线23长4米,直线12,直线34长30米。则输入图像与输出图像点的坐标如上图所示。
# GET MATRIX
src = np.float32([
(243.3086, 2006.09253), (987.90594, 1271.23894),
(1410.03022, 1272.49526), (2073.4596, 2003.7979)
])
dst = np.float32([
(90, 500), (90, 200), (130, 200), (130, 500)
])
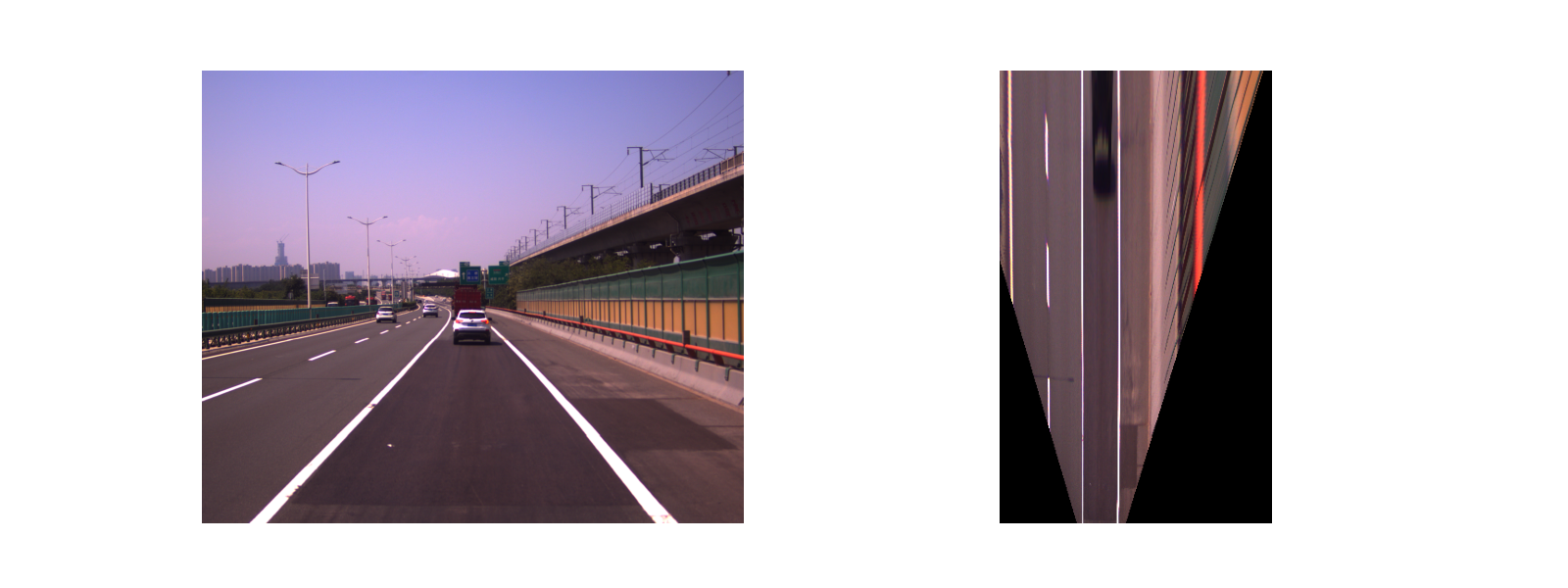
Matrix = cv2.getPerspectiveTransform(src, dst)
warped_image = cv2.warpPerspective(image, Matrix, (300, 500))
车道线定位
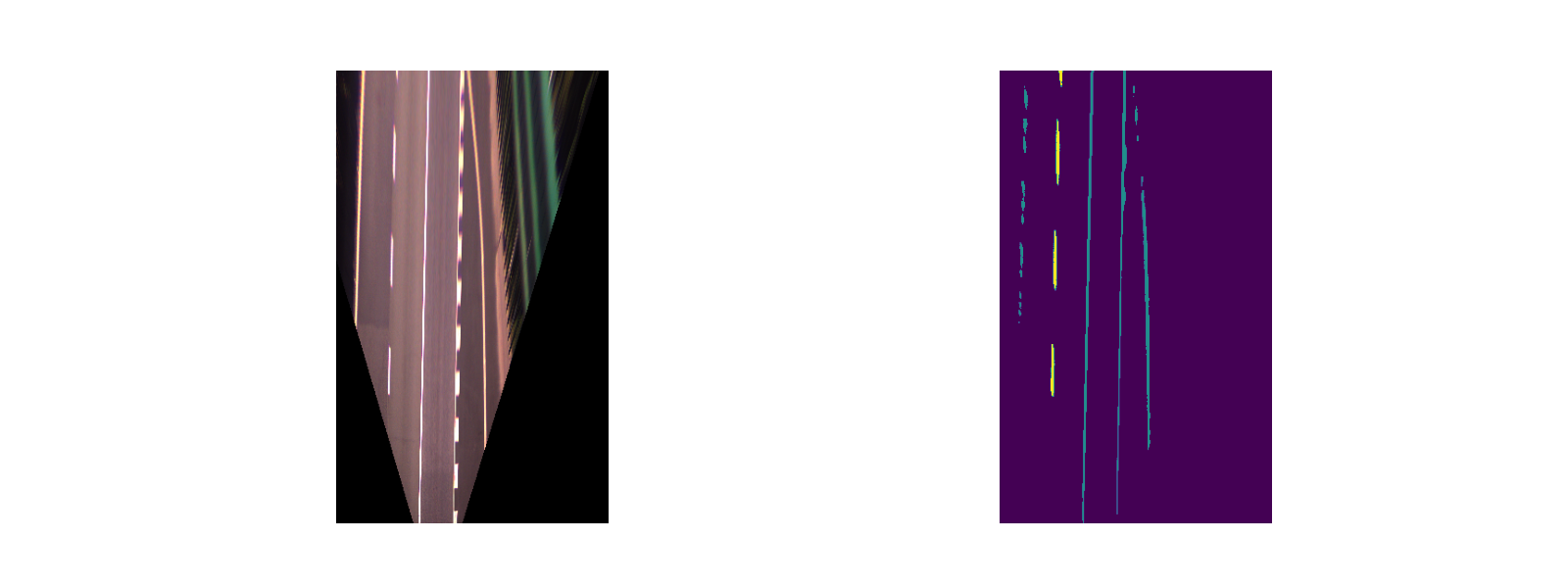
假设已经获得了车道线的分割图像,并将其转换为鸟瞰图。
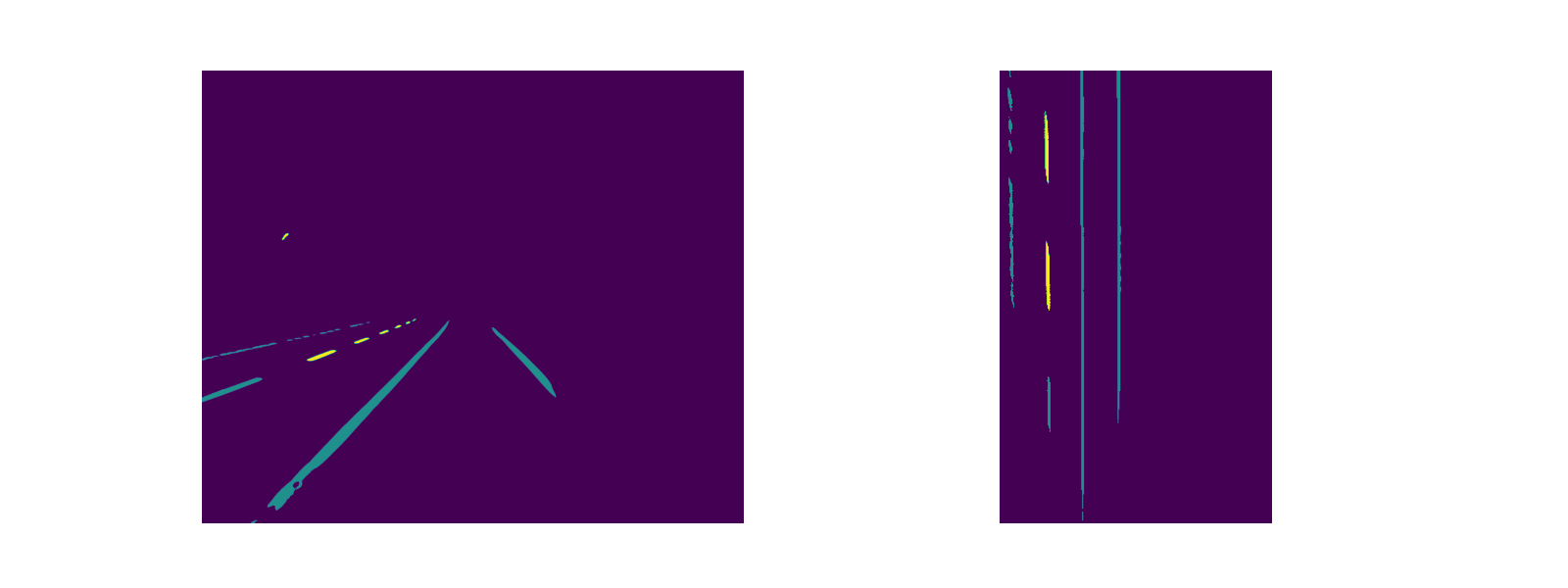
现在有了车道线分割图的鸟瞰图,那么如何确定当前有几条车道线以及车道线所处的位置呢?
可以对鸟瞰图进行垂直方向的累加投影。理论上,有几个峰值就有几条车道线,而峰值点的位置即为车道线的位置坐标。
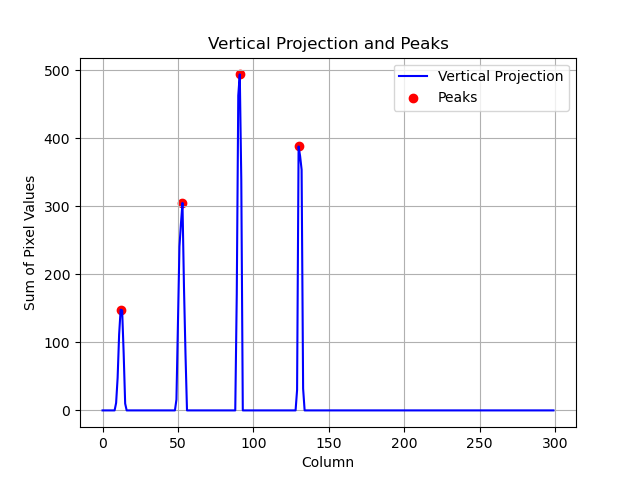
从上图可以看出,一共有四条车道线,且车道线的服务器托管网大致位置也是已知的。之后可以通过滑动窗口法,以峰值点为起点对车道线的点进行搜索。
滑动窗口法的工作原理如下:
- 设置窗口大小
- 确定窗口的宽度和高度,通常是矩形区域。
- 窗口的高度可以根据图像的大小和问题的特定要求进行调整。
- 滑动窗口
- 从图像底部开始,以固定步长(通常是一个窗口的高度)向上滑动窗口。
- 对于每个窗口,统计窗口内的非零像素的个数
- 更新窗口
- 若窗口内的非零像素数量超过阈值,更新窗口中心位置为当前窗口内非零像素的平均横坐标。
- 拟合曲线
- 针对每个滑动窗口内的非零像素,使用
np.polyfit对这些点进行二阶多项式拟合,得到曲线的系数。
- 针对每个滑动窗口内的非零像素,使用
def finding_line(warped_mask, x_points, sliding_window_num=9, margin=15, min_pixels_threshold=50):
# 获取图像的高度和宽度
height, width = warped_mask.shape
# 获取图像中所有非零像素的坐标
nonzero_y, nonzero_x = np.nonzero(warped_mask)
# 计算滑动窗口的高度
sliding_window_height = height // sliding_window_num
# 用于存储每个滑动窗口内的像素索引
line_pixel_indexes = [[] for _ in range(len(x_points))]
# 遍历滑动窗口
for i in range(sliding_window_num):
for idx, x_point in enumerate(x_points):
# 确定窗口在y轴上的边界
top, bottom = height - (i + 1) * sliding_window_height, height - i * sliding_window_height
# 确定窗口在x轴上的边界
left, right = x_point - margin, x_point + margin
# 获取窗口内的非零像素索引
window_pixel_indexes = ((nonzero_y >= top) & (nonzero_y = left) & (nonzero_x min_pixels_threshold:
x_point = int(np.mean(nonzero_x[window_pixel_indexes]))
# 用于存储拟服务器托管网合的曲线系数
lines = []
# 处理每个滑动窗口的像素索引
for line_pixel_index in line_pixel_indexes:
# 合并像素索引
line_pixel_index = np.concatenate(line_pixel_index)
# 提取坐标
line_x, line_y = nonzero_x[line_pixel_index], nonzero_y[line_pixel_index]
# 使用多项式拟合曲线,并将结果添加到lines中
lines.append(np.polyfit(line_y, line_x, 2))
return lines
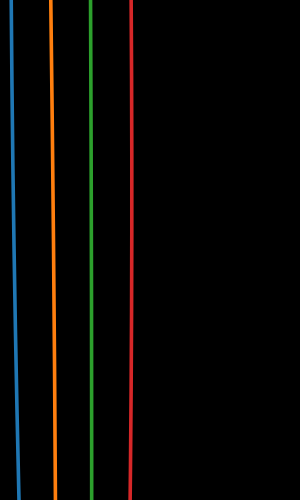
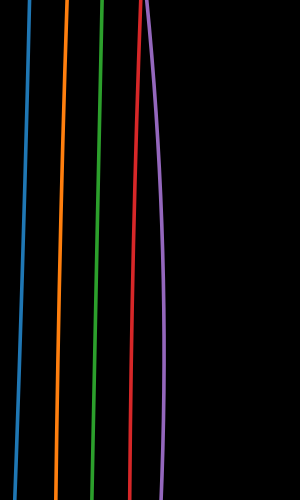
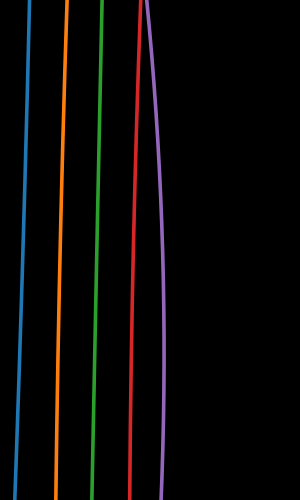
上述为拟合后的车道线在鸟瞰图上的效果。
复杂情况
然而,上述结果是在理想条件下(车道线分割结果准确无误、车道线曲率不大)得到的结果。当情况复杂时,直接以峰值点作为车道线的个数以及大致位置的方式可能行不通。
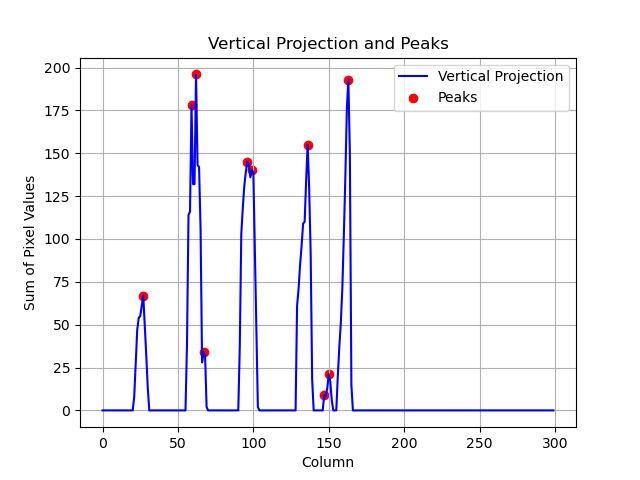
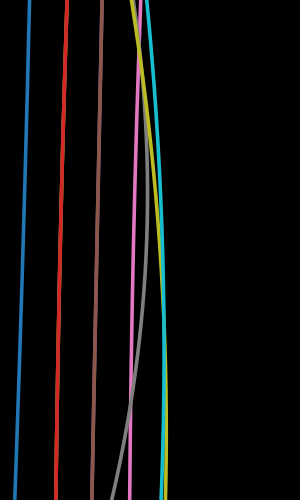
从上图可以发现,实际共有5条车道线,但得到了10个峰值点,且拟合出的10条曲线有3条是重叠的(红色、棕色分别重叠2、1次)。
根据这些信息,可以采取两种解决办法:
- 在拟合前进行过滤
- 在拟合后进行过滤
在拟合前进行过滤
通过直方图不难看出,车道线的间距在20~30像素,且每条车道线的峰值像素个数不小于50。可以根据这些关系对数据进行过滤。
在拟合后进行过滤
由于使用二阶多项式对车道线拟合, 而二阶多项式系数在二次多项式方程中具有几何意义,这个方程一般表示为:
]
其中,(a), (b), 和 (c) 是系数,决定了二次多项式的形状。系数的组合产生了不同形状和位置的二次曲线,反映了二次多项式方程在平面上的几何特征。
上文我们已经知道了车道线的间距在20~30像素,可以通过比较相邻两二次多项式在 (0 的情况下,以x的最大值作差,作为两车道线的间距。若间距小于20,则代表是一条车道线,保留其中系数 b 最接近于0的(曲率最小的)作为车道线。
将拟合后的车道线投影到原图上
在完成车道线的拟合后,可以将拟合出的车道线投影回原始图像中。这个过程涉及逆透视变换,将鸟瞰图上的车道线投影回原始图像上。

服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
