
一种同时检测电流传感器故障和估计电动汽车电池能量状态的方法
徐军1,2,*,王1,2,李世英1,2,曹冰刚1,2
1.
西安交通大学机械工程学院,西安710049
2.
西安交通大学制造系统工程国家重点实验室,西安710049
*
通信地址应为的作者。
传感器2016,16(8),1328;https://doi.org/10.3390/s16081328
接收日期:2016年5月25日/修订日期:2016月8日/接受日期:2016年初16日/发布日期:2016年末19日
(本文属于“物理传感器”一节)
摘要
近年来,能源状态(SOE)已成为电动汽车电池管理系统的最基本参数之一。然而,电流信息在SOE估计中是关键的,并且电流传感器通常用于获得最新的电流信息。然而,如果电流传感器发生故障,SOE估计可能会面临较大的误差。因此,本文试图做出以下贡献:电流传感器故障检测和SOE估计方法同时实现。通过使用基于比例积分观测器的方法,可以准确地估计电流传感器的故障。通过利用准确估计的电流传感器故障,可以消除和补偿电流传感器故障造成的影响。因此,SOE估计的结果将很少受到故障的影响。此外,还建立了仿真实验工作台,对所提出的方法进行了验证。结果表明,电流传感器故障可以准确估计。同时,还可以准确地估计SOE,并且估计误差几乎不受故障的影响。即使电流传感器故障引起的大电流误差仍然存在,最大SOE估计误差仍小于2%。
关键词:故障检测;能源状况估计;电池模型;比例积分观测器;电池管理系统;电动汽车
添加图片注释,不超过 140 字(可选)
1.简介
由于污染和能源危机,电动汽车(EV),包括电池电动汽车(BEV)、混合动力电动汽车(HEV)和插电式混合动力电动车辆(PHEV)具有重要意义[1,2,3]。为了满足此类应用的电力和能源需求,稳定的锂离子电池组应采用大量串联或并联的电池组。电池管理系统(BMS)用于保持最佳电池性能并确保电动汽车的安全。作为BMS的关键功能,应在线监测充电状态(SOC)、健康状态(SOH)和能源状态(SOE)。至于电动汽车的应用,电动汽车的剩余续航里程还有多少是人们应该关注的关键点。事实上,SOE(表示电池中的剩余可用能量)比SOC更有资格估计剩余续航里程[4,5]。不幸的是,SOE无法直接测量。作为SOE估计的最重要的信息源,电流传感器可能会出现故障,并且所提供的电流信息可能具有偏差。因此,电池的准确SOE估计仍然相当具有挑战性和问题。
先前已经报道了各种技术来估计电动汽车中电池的SOC,每种技术都有其相对的优点。安培小时计数/积分(库仑计数)法(ACM)基于电流测量和积分,被认为是最常见的SOC估计方法。然而,需要初始SOC的先验知识,并且其存在噪声和测量误差的累积误差[6,7]。尽管开路电压(OCV)方法非常准确,但它需要很长的休息时间来估计SOC,因此不能用于实时应用[6]。此外,基于滑模观测器的估计[8,9,10,11],基于扩展卡尔曼滤波(EKF)的估计[12,13,14,15],基于比例积分观测器(PIO)的估计[16,17,18,19],基于支持向量的估计[20],神经网络(NNs)[21,22]和基于模糊逻辑原理的估计[23],等已被广泛应用于估计电池的SOC。
关于国有企业估计,已经进行了一些研究。[24]中使用了基于反向传播神经网络(BPNN)的方法来估计SOE。该方法考虑了能量损失对内阻、电化学反应、OCV下降、放电速率和温度波动的影响。然而,该方法过于复杂,无法在实际应用中广泛实现。H.He等人[25]选择了中心差分卡尔曼滤波器(CDKF)和高斯模型来估计SOE,并得出估计误差较小的结论。王等人[26]提出了一种基于PF算法的联合估计方法,分别获得SOC和SOE。然而,SOE的估计精度取决于SOC已经被很好地计算的前提。董等人[27]采用双滤波器EKF加PF来估计SOE。前者用于在线更新电池模型参数,后者用于估计SOE。将带遗忘因子的递归最小二乘法(RLS)用于识别电池模型,并将自适应技术用于估计SOE[28]。仿真结果验证了该方法的有效性。Barai等人[4]提出了一种新的基于短期循环历史的SOE估计方法。
到目前为止,已经对上述方法进行了研究,并在不同的应用中取得了可接受的成果。然而,上述大多数方法都依赖于电流信息,即电流传感器。如果电流传感器出现故障怎么办?如果没有适当的措施,估计的SOE将是无用的,这可能会对电池造成危险,因为可能会发生过充电或过放电。事实上,故障检测和诊断的应用并不是什么新鲜事,在这一领域已经进行了广泛的工作,重点是不同的故障和相关技术。在[29]中,使用非奇异快速终端滑模观测器检测IPMSM的永磁体消磁。Gang Huang等人利用滑模观测器对永磁同步电机驱动系统的电流传感器进行故障检测[30]。此外,故障检测也变得越来越重要,集中精力检测不同的电池故障。A.Izadian等人提出了一种特殊类型的基于观测器的故障检测技术,即多模型自适应估计技术,以及由于可以检测到过放电而导致的锂离子电池的性能变化[31,32]。[33]中采用了Luenberger观测器(LO)的综合设计,以及用于故障隔离和估计的等效电路模型(ECM)。LO是在测量噪声很小或没有测量噪声的系统中进行故障检测的合适候选者。然而,由于存在噪声,这种设置遇到了固有的困难,特别是性能变化。基于自适应模型的技术被用于诊断锂离子电池的过充和过放电故障[34]。作者在[35]中采用了一个条件三参数容量退化模型。使用几种技术,如神经网络(NN)、自回归移动平均(ARMA)、模糊逻辑(FL)和阻抗谱(IS)等,提出了电池参数识别、估计和预测方法。[36]。
在这些方法的支持下,可以在故障达到极端条件之前检测到所述故障。然而,很明显,上述相关故障大多与电池本身有关,但很少与传感器有关,尤其是与用于SOE估计的电流传感器有关。Satadru-Dey等人利用三个滑模观测器独立估计三个传感器故障[37]。刘振通等实现了电流传感器故障等5种故障的检测与隔离[38]。然而,当检测到故障时,大多数研究都是令人满意的。如何修复故障或采取措施减少故障的影响仍有待解决。
在这项工作中,引入了比例积分观测器(PIO)来同时检测电流传感器的故障和估计SOE。利用PIO的独特特性,可以将电流故障与状态估计隔离开来,从而获得准确的电流传感器故障。此外,通过准确的估计结果,可以有效地消除故障的影响。因此,即使发生了电流传感器故障,SOE估计也可以是准确和稳健的。本文的其余部分组织如下:在第2节中,引入了简化的电池模型,并推导了电池模型的状态空间表达式。第3节提出并分析了基于PIO的电流传感器故障检测和SOE估计方法;第4节建立了仿真和实验验证,并对结果进行了分析。结论见第5节。
2.电池模型的建立与分析
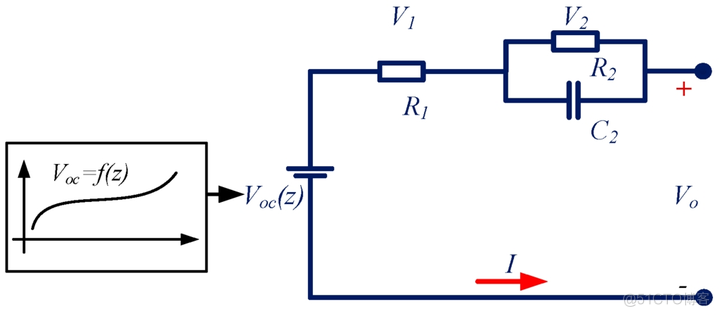
为了实现可靠的电池状态估计和故障检测,必须首先建立准确的模型。考虑到精度和计算复杂性,引入简化的电池模型来表征电池。简化电池模型的示意图如图1所示。如图所示,使用了几种常用的电气部件。采用OCV来描述电压源;串联电阻(1) 用于描述各种电池组件的电阻;扩散阻力(2) 以及扩散电容(2) 采用由RC网络组成的网络来描述质量传输效应和动态电压性能;负载电流假定充电为正,而放电为负;和1是端子电压和过电压分别为1,2描述了RC网络上的扩散电压。电池OCV表示为()在该模型中,描述不同国有企业下的OCV,其中是电池SOE的缩写。
添加图片注释,不超过 140 字(可选)
图1。简化的电池模型。
根据电路理论,可以得到方程(1)和(2)来描述模型中不同参数的电关系。

添加图片注释,不超过 140 字(可选)
根据SOE的定义,即剩余能量与标称能量的比率,数学关系可以写成方程(3)。

添加图片注释,不超过 140 字(可选)
哪里(0)和()分别是初始SOE和时间t处的SOE的缩写;是电池SOE在从0到t的时间段期间的变化,()是瞬时电池功率,以及是标称电池能量。自从(0)是任何给定情况下的常数,方程(3)可以重写为:

添加图片注释,不超过 140 字(可选)
如果2和被选择为电池模型的状态,状态函数可以写成:

添加图片注释,不超过 140 字(可选)
对于给定的非线性系统,SOE和()可以分为几个部分,每个部分中的子系统被认为是线性的[39]。因此,对于第i个SOE间隔,可以在短SOE间隔中写入如下关系(−1) ≤≤⋅:

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
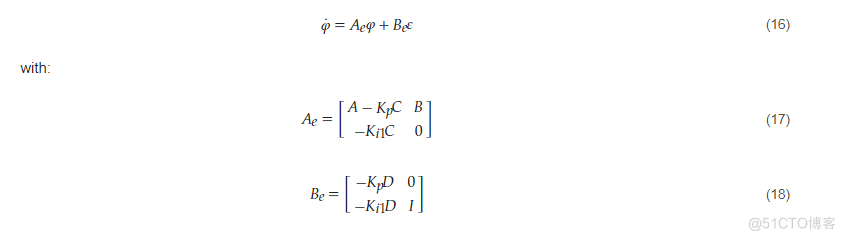
具有附加状态的状态空间函数可以重写为:

添加图片注释,不超过 140 字(可选)
3.基于比例积分观测器的电流传感器故障同时检测和SOE估计方法
在本节中,假设电流传感器故障是实际电流和测量电流之间的差值。这种delta电流故障表示为电流传感器故障.考虑到电池模型受到电流传感器故障的影响,状态空间方程如下所示:

添加图片注释,不超过 140 字(可选)
哪里∈ℝ21表示电池状态,即2和如前一节所述,∈ℝ11为测量输出,∈ℝ11是系统的输入,即电流在电池模型中,表示电流传感器故障。A、 B、C和D是具有适当维度的已知系数矩阵,可以从电池的测试数据中识别。
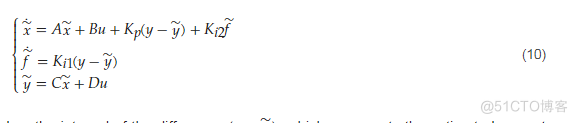
为了利用PIO的独特特性,PIO被应用于电池模型,观测器的设计如下:
添加图片注释,不超过 140 字(可选)
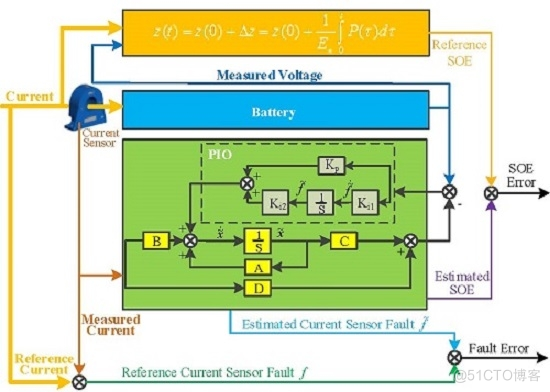
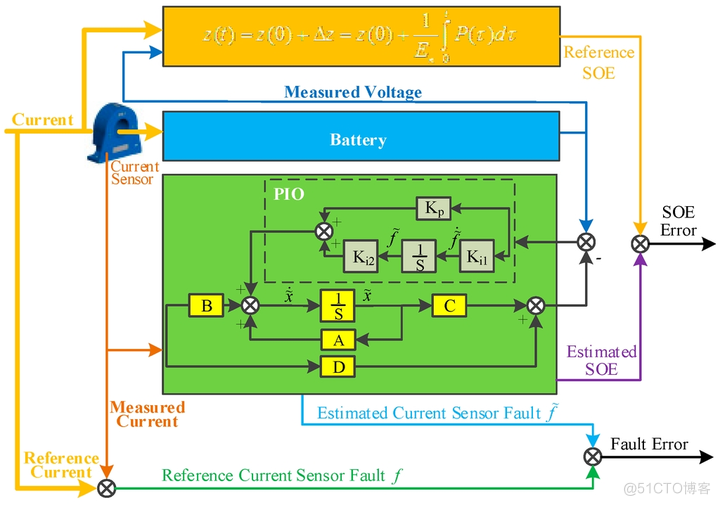
请注意,变量定义为差的积分(−表示估计的电流传感器故障。矢量∈ℝ1为比例增益,1∈ℝ11和2∈ℝ21是积分增益。基于PIO的电流传感器故障检测和补偿的设计框图如图2所示。
Back to Top
添加图片注释,不超过 140 字(可选)
图2:同时检测电流传感器故障和估计SOE的方法。
假设影响系统的故障是有界的。状态重建误差和故障重建误差的表达式由以下方程提供:

添加图片注释,不超过 140 字(可选)
状态重构误差的动力学通过计算给出▪可以写成:

添加图片注释,不超过 140 字(可选)
为了估计电流传感器故障,设计为2=,因此,方程(12)可以改写如下:

添加图片注释,不超过 140 字(可选)
故障误差估计如下:

添加图片注释,不超过 140 字(可选)
介绍了以下矩阵:

添加图片注释,不超过 140 字(可选)
介绍了以下矩阵:

添加图片注释,不超过 140 字(可选)
根据方程(13)-(15),可以得到以下方程:
添加图片注释,不超过 140 字(可选)
其中矩阵是具有适当维度的单位矩阵。误差方程的收敛性可以通过如下选择李亚普诺夫候选函数来证明:

添加图片注释,不超过 140 字(可选)
其中P表示定义的正矩阵。状态重建错误以及故障重建误差如果根据李雅普诺夫理论,*

添加图片注释,不超过 140 字(可选)
它可以重写为:

添加图片注释,不超过 140 字(可选)
不等式<0的分解导致的值为和1.通过这些过程,李亚普诺夫候选函数的微分被保证为负,这意味着当→∞,估计状态将收敛到真实状态以及估计的故障将收敛到真正的故障.
4.仿真与实验验证
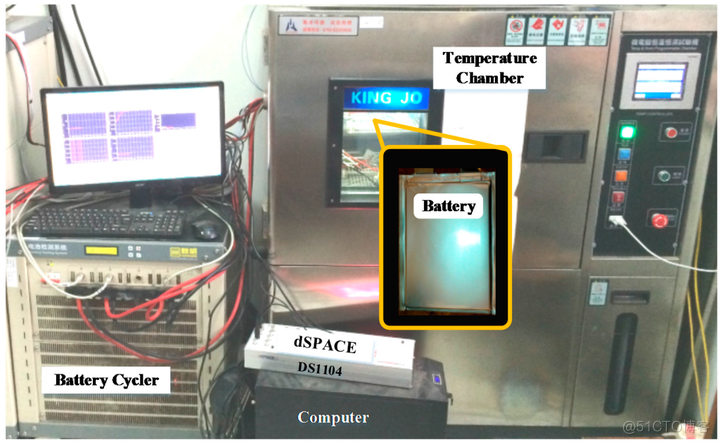
为了验证所提出的电流传感器故障检测和补偿策略的有效性,建立了仿真和实验验证。本研究所用的实验数据是通过如图3所示的电池测试台获得的,该测试台由电池循环仪、用于环境控制的温度室、用于执行所提出方法的带有d SPACE的计算机和实验数据存储组成
添加图片注释,不超过 140 字(可选)
图3。实验电池测试工作台。
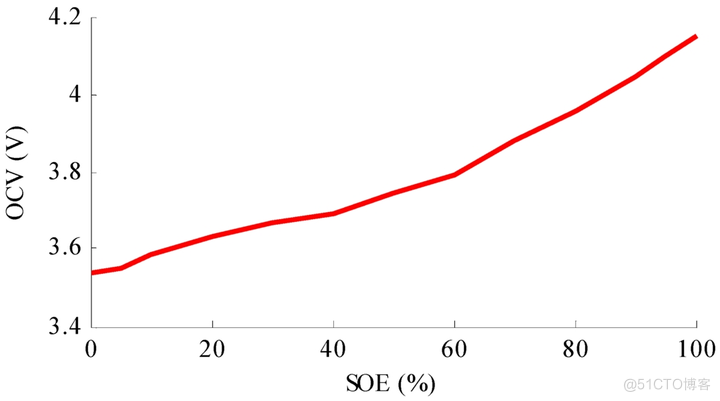
如图所示,电池循环仪由计算机通过TCP/IP控制,用于向电池施加电流分布。同时,电压、电流和温度由电池循环仪测量,数据将发送到计算机。本文假设电池循环仪测量的消息相对真实,存储的数据将作为参考信号。例如,电流将用于计算SOE,并且可以获得参考SOE。在实际实施中,将电池放置在温度室中以模拟电池的温度环境。本文使用d SPACE DS1104控制板来执行所提出的算法。电流信号由电流传感器通过ADC测量,电池的电压直接通过控制板的另一个ADC测量。该算法是在Matlab/Simulink环境下实现的。在Matlab/Simulink环境中对算法进行仿真验证后,对模型进行修改并下载到d SPACE控制板上。d SPACE控制板执行算法,并将计算的数据发送回计算机,如估计的SOE、估计的电流传感器故障等。测试电池的标称容量为20 Ah,标称电压为3.7 V。上截止电压和下截止电压分别为4.2V和2.75V。基于测试数据,引入最小二乘法计算电池模型的参数1.2和2.电池模型的计算参数为:R1=0.0027Ω,R2=0.0042Ω,C2=25000f, =[00032、0.0071、0.0052、0.0051、0.0029、0.0033、0.0051,0.0085、0.0079、0.0088、0.0100、0.0111、0.0111]和 =[3.5264、3.5071、3.5252、3.5286、3.5952、3.5772、3.4892、3.281、3.3244、3.25、3.1447、3.044、3.044]。OCV和SOE之间的关系如图4所示
添加图片注释,不超过 140 字(可选)
图4。OCV与SOE之间的关系。
城市测功机驾驶计划(UDDS)是一种用于城市驾驶的汽车行业标准车辆时间速度曲线,多年来一直用于电动汽车性能测试。根据UDDS计算并缩放为峰值放电功率百分比的电流分布用于模拟电动汽车中配备的电池的实际功率要求。在本研究中,峰值放电电流设置为4.5 C速率(90 A)。参考SOE剖面是使用测量数据的定义方法计算的。
4.1拟议方法的模拟研究
为了证明所提出方法的有效性,在上述实验结果的基础上,对电池模型的参数进行了计算。电池模型用于计算电池的电压响应。同时,在所提出的电流传感器检测和SOE估计方法中也采用了相同的电池模型参数。该方法的参数分别为:Kp=[0.5;0.5],Ki1=[85],Ki2=[8e−5;1.389e−3]。
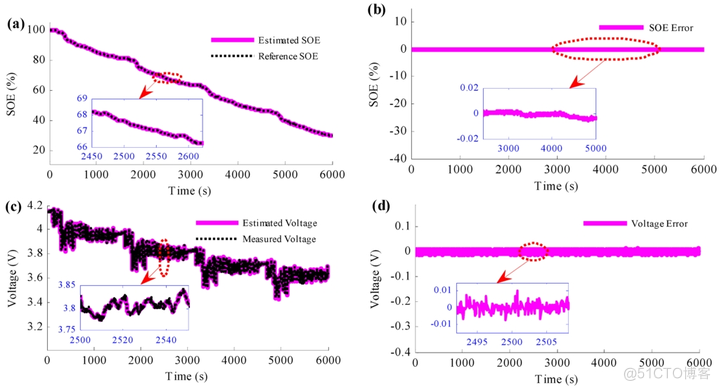
首先,为了验证所提出的方法,首先研究了电流传感器工作良好时的正常情况,如图5所示。在这种情况下,电池充满电,这意味着电池的初始SOE为100%。图5a、b是所提出方法的估计SOE的模拟结果,估计电压和测量电压之间的比较如图5c所示。SOE估计结果表明,估计的SOE收敛于参考SOE,这在前一节中已经证明了PIO的性质。此外,SOE估计误差结果也给出了相同的结论。此外,根据SOE估计误差结果的缩放图,很明显,估计的SOE准确地跟踪了参考轨迹,SOE估计错误小于0.01%。主要原因是电池模型在该模拟中非常准确。电压估计结果表明,电压预测误差小于10mV,非常准确。
添加图片注释,不超过 140 字(可选)
图5。电流传感器正常工作时的仿真结果:(a)SOE估计结果;(b) SOE估计误差;(c) 电压结果;(d) 电压估计误差。
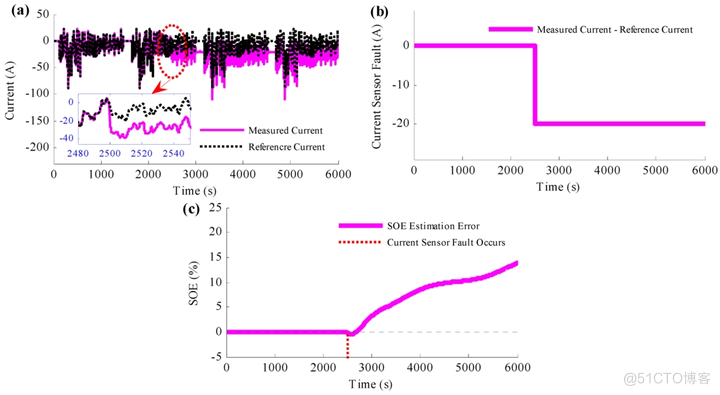
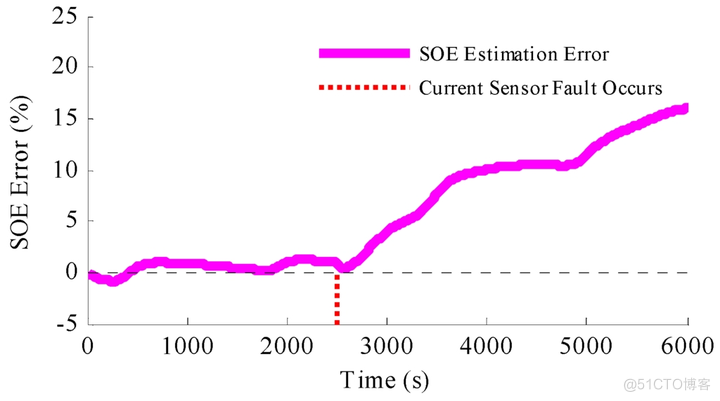
为了确定电流传感器故障对SOE估计的影响,设置了一种特殊情况,即电流传感器将在2500 s时发生故障。此时,电流传感器将产生恒定电流误差,在本节中设置为−20 a,如图6a、b、c所示,显示了当电流传感器发生故障且未采取任何行动时的SOE估计结果。从图中可以明显看出,在电流传感器故障发生之前,估计的SOE准确地跟踪了参考SOE。在时间2500s,当电流传感器在没有采取任何行动的情况下发生故障时,服务器托管网估计的SOE突然偏离参考SOE,并且SOE估计误差变得越来越大。从那时起,估计的SOE变得不那么准确,不能再作为设计和控制参考。
添加图片注释,不超过 140 字(可选)
图6。当电流传感器在没有采取任何行动的情况下发生故障时的仿真结果:(a)由电流传感器故障引起的测量电流和参考电流结果;(b) 由测量电流减去参考电流引起的电流故障;(c) 当电流传感器发生故障且未采取任何措施时,会产生SOE估计结果。
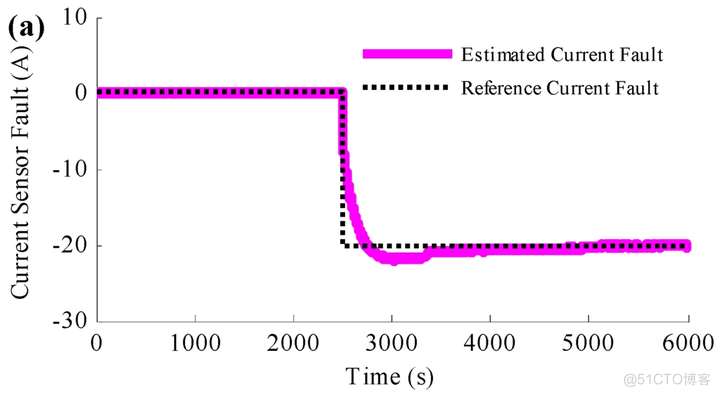
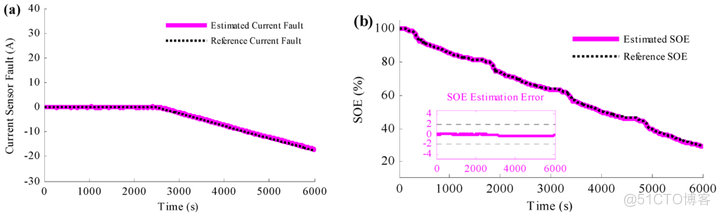
为了减少电流传感器故障造成的影响,将所提出的电流传感器故障检测和SOE估计方法同时应用于仿真,结果如图7所示。图7a是估计电流故障和参考电流故障之间的比较剖面图。图7b显示了电流传感器发生故障时的估计SOE和参考SOE,图7c是SOE估计误差。根据图7a,发现估计的电流误差在短时间后收敛到参考电流误差;在收敛之后,估计的电流误差精确地跟踪参考轨迹。从图7b,c中可以清楚地看出,当电流传感器发生故障时,估计的SOE突然偏离参考SOE。然而,由于基于PIO的电流传感器故障检测方法,估计的SOE在短时间内收敛到参考SOE。此外,从那时起,即使电流传感器仍然存在较大的误差,估计的SOE也可以与参考SOE保持一致,这意味着所提出的方法不仅能够估计电流传感器的故障,而且能够补偿故障。有了这些措施,SOE估计对电流传感器故障是鲁棒的。
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
图7。应用同时检测电流传感器故障和估计SOE的方法时的仿真结果:(a)估计的电流故障与参考电流故障之间的比较;(b) SOE估算结果;(c) SOE估计错误。
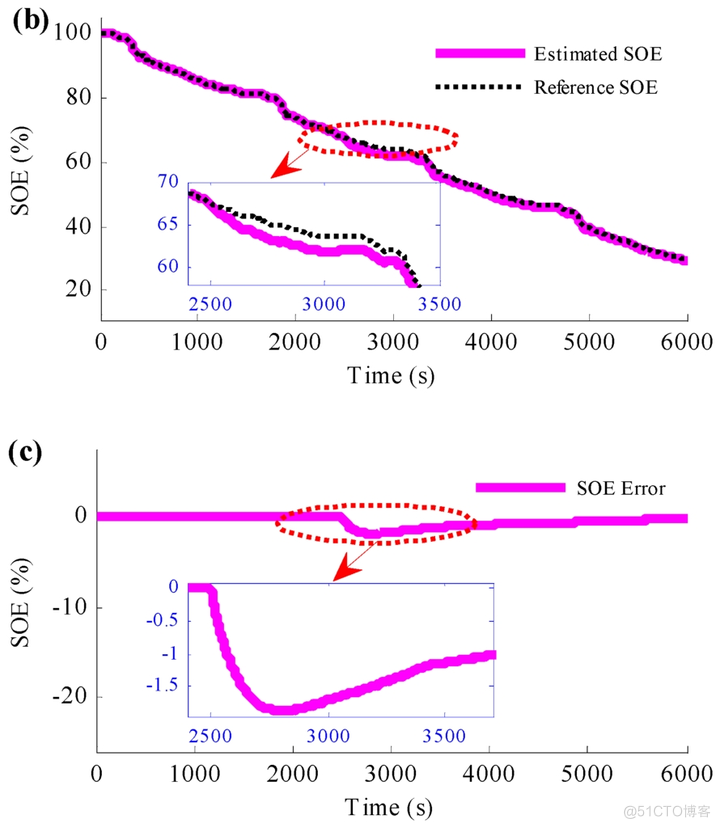
为了研究电流传感器故障的更严重情况,在下一次模拟中,假设故障引起的电流误差为正弦曲线,结果如图8所示。图8a是估计电流故障和参考电流故障之间的比较,估计SOE如图8b所示。根据图8a,可以得出结论,电流传感器故障导致较大的电流误差,其峰值为40A。然而,从图中可以看出,估计的电流误差准确地追踪到参考误差,即使参考电流误差也会呈正弦变化。图8b显示,在如此大的电流误差下,所提出的方法可以确保估计SOE的准确性。即使存在40A峰峰值正弦电流故障,SOE估计误差也小于2%。
添加图片注释,不超过 140 字(可选)
图8。当电流传感器故障为正弦时的仿真结果,并应用了同时检测电流传感器故障和估计SOE的方法:(a)估计的电流故障结果;(b) SOE估计结果。
仿真中还研究了电流传感器故障引起的斜坡型电流误差,结果如图9所示。附图所示的结果表明,也可以估计这种斜坡型电流误差,并且SOE估计也可以是准确的。
添加图片注释,不超过 140 字(可选)
图9。电流传感器故障为斜坡型时的仿真结果,以及同时检测电流传感器故障和估计SOE的方法:(a)估计的电流故障结果;(b) SOE估计结果。
从仿真验证结果可以看出,所提出的同时检测电流传感器故障和估计SOE的方法能够在电流传感器故障发生时准确估计电流误差;此外,该方法还能够补偿电流传感器故障,并且可以在短时间内消除故障对SOE估计的影响,甚至可以考虑严重的情况。电池在回路中的实验验证将在下一节中讨论。
4.2.建议方法的实验验证
在本节中,使用实际电池代替电池模型对所提出的方法进行实验验证。实验验证工作台的建立如图3所示。电流传感器用于获得用于状态估计方法的电流信息,而在本研究中,假设电池循环仪测量的电流信息是真实的电流信息。与模拟类似,首先分析了电流传感器正常工作时的正常情况,结果如图10所示。
添加图片注释,不超过 140 字(可选)
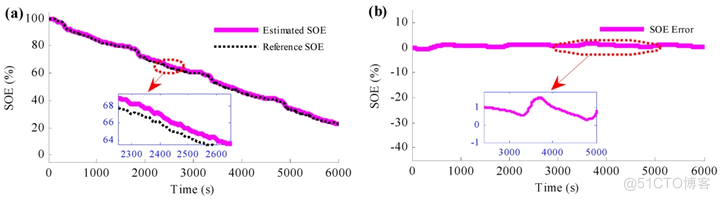
图10。电流传感器正常工作时的实验结果:(a)SOE估计结果;(b) SOE估计错误。
图10a显示了电流传感器正常工作时的SOE估计结果,而SOE估计误差如图10b所示。从图10中可以清楚地看出,即使在实验中测试了实际电池,该方法也可以获得准确的SOE。估计的SOE跟踪误差较小的参考SOE,SOE估计误差合并在2%的误差范围内。
为了模拟电流传感器故障,在2500 s时向电流传感器输出引脚添加电压偏置。通过此操作,由于2500 s,用于SOE估计方法的电流具有一定的误差,在本研究中为−20 a。
如果在电流传感器发生故障时没有采取任何行动,则SOE估计存在较大误差,如图11所示。很明显,当电流传感器故障发生在2500秒时,估计的SOE立即开始偏离参考SOE,此后,SOE估计误差越来越大。
添加图片注释,不超过 140 字(可选)
图11。电流传感器在不采取任何措施的情况下发生故障时的实验结果。
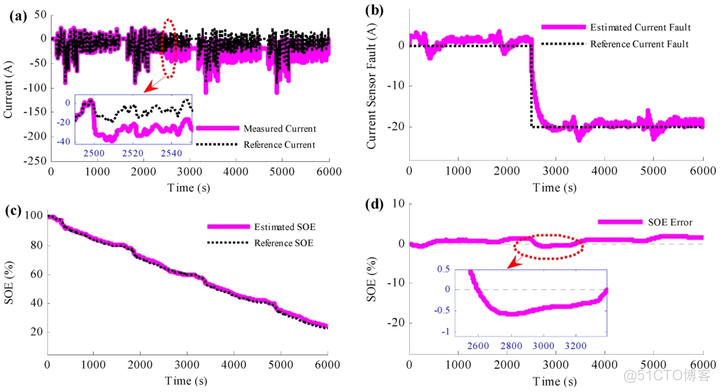
图12显示了将所提出的电流传感器故障检测和SOE估计方法应用于实验时的结果。电流传感器故障时的真实电流和测量电流如图12a所示。图12b是估计电流故障和参考电流故障之间的比较曲线。图12c显示了所提出方法的SOE估计结果。图12a及其放大图显示,电流传感器故障为SOE估计方法提供了错误的电流信息。然而,图12b显示,由电流传感器故障引起的电流误差可以准确估计。即使在2500 s时从0 a到−20 a有阶跃变化,估计的电流误差也能很好地跟踪参考电流故障。估计的电流故障在短时间内收敛到参考电流故障,这为所提出的方法提供了准确的信息来补偿它。然而,与图7中的模拟结果相比,当应用实际电池时,估计的误差纹波更大,这被认为是由电池建模误差引起的。
添加图片注释,不超过 140 字(可选)
图12。应用同时检测电流传感器故障和估计SOE的方法时的实验结果:(a)电流结果;(b) 在估计的电流故障和参考电流故障之间的比较;(c) SOE估算结果;(d) SOE估计误差的结果。
如图所示,电流传感器故障检测和SOE估计方法同时实现,估计准确。与模拟结果类似,估计的SOE准确地追踪到参考SOE,如图10c所示。当电流传感器发生故障时,估计的SOE与参考SOE有一点偏差,并且在短时间内,估计的国企收敛到参考SOE。最大SOE估计误差小于2%,正好存在于电流传感器故障发生的时间。此后,即使电流传感器仍然有很大的误差,估计的SOE也会坚持参考SOE。
5.结论
本文提出了一种同时检测电动汽车中电流传感器故障和估计电池SOE的方法。首先介绍并分析了简化的电池模型。其次,提出了基于PIO的电流传感器故障检测和SOE估计方法。证明了故障检测和状态估计的收敛性。为了在不受建模误差影响的情况下提高所提出方法的效率,首先对所提出方法进行了仿真。可以准确地估计电流传感器故障引起的电流误差,有效地获得电池的SOE。为了进一步验证该方法,建立了电池测试工作台,并将该方法应用于电动汽车中使用的实际电池。通过实验验证了故障估计和SOE估计的可接受精度。电流传感器故障引起的电流误差可以准确估计,即使误差很严重。电流传感器故障造成的影响可以在短时间内消除,最大SOE估计误差小至2%。
鸣谢
本研究得到了国家自然科学基金(51405374)、博士后科学基金(2014M560763)、博士后专项基金(2016T90904)、中央高校基本科研业务费和陕西省博士后科学基金的资助。
作者贡献
徐军和曹秉刚设计了整体算法和仿真;李世英和王静设计并进行了实验;徐军和李世英对数据进行了分析并撰写了论文。
利益冲突
作者声明没有利益冲突。
参考文献
Nam,K.新型横向轮胎力传感器在电动汽车车辆参数估计中的应用。传感器2015、15、28385–28401。[谷歌学者][交叉参考][Pub Med]
巴里拉斯,J.K。;李,J。;Gnther,C。;Danzer,M.A.电池管理系统中锂离子电池状态估计算法的比较研究和验证。Appl。能源2015,155455–462。[谷歌学者][交叉参考]
米兰-蒙特罗,M.I。;Gallardo Lozano,J。;Romero Cadaval,E。;Gonzlez Romera,E.基于霍尔效应的电动汽车半快速交流车载充电设备。传感器2011、11、9313–9326。[谷歌学者][交叉参考][Pub Med]
Barai,A。;Uddin,K。;Widanalage,W.D。;Mc Gordon,A。;Jennings,P.平均循环电流对电动汽车锂离子电池总能量的影响。J.Power Sour。2016年,303,81–85。[谷歌学者][交叉参考]
徐,J。;曹,B.电动汽车电池管理系统:建模、状态估计和平衡。《电气传动的新应用》,第1版。;Chomat,M.,编辑。;技术方面:克罗地亚里耶卡,2015年;第87-113页。在线提供:http://www.intechopen.com/books/new-applications-of-electric-drives/battery-management-system-for-electric-drive-vehicles-modeling-state-estimation-and-balancing(2016年8月19日访问)。
帕蒂皮,B。;Sankavaram,C。;Pattatipi,K.关键汽车电池管理系统特征的系统识别和估计框架。IEEE Trans。系统。曼赛本。C部分应用。修订版2011,41869–884。[谷歌学者][交叉参考]
Kutluay,K。;Cadirci,Y。;Ozkazanc,Y.S。;Cadirci,I.一种用于通信电源中密封铅酸电池的新型在线充电状态估计和监测系统。IEEE Trans。Ind.Electron。2005年,521315–1327。[谷歌学者][交叉参考]
Kim,I.S.使用滑模观测器的锂电池充电状态估计新方法。J.Power Sour。2006年,163,584–590。[谷歌学者][交叉参考]
Il Song,K.混合动力汽车电池的非线性电荷状态估计器。IEEE Trans。Power Electron。2008年,2027-2034年。[谷歌学者][交叉参考]
Kim,I.L.-S.通过双滑动模式观察者估计锂电池健康状态的技术。IEEE Trans。Power Electron。2010年,251013–1022。[谷歌学者]
宁,B。;徐,J。;曹,B。;王,B。;徐,G.一种基于参数自适应电池模型的滑模观测器soc估计方法。2015年11月15日至17日,中国福州,《2015中国城市应用能源研讨会和峰会论文集:低碳城市和城市能源系统》。
Plett,G.L.基于lipb的混合动力汽车电池组电池管理系统的扩展卡尔曼滤波:第1部分。背景J.Power Sour。2004年,134,252–261。[谷歌学者][交叉参考]
孙,F。;熊。;He,H.考虑不同健康状况的锂离子电池充电状态和功率能力状态的估计。J.Power Sour。2014年,259,166–176。[谷歌学者][交叉参考]
熊。;孙,F。;陈。服务器托管网;He,H.一种基于数据驱动的多尺度扩展卡尔曼滤波的电动汽车锂离子聚合物电池参数和状态估计方法。Appl。能源2014,113463–476。[谷歌学者][交叉参考]
陈。;Mi,C.C。;傅。;徐,J。;龚,X.基于遗传算法的电动汽车和混合动力汽车在线电池健康状态估计。J.Power Sour。2013年,240,184–192。[谷歌学者][交叉参考]
徐,J。;曹,B。;陈。;Zou,Z.一种减少先前电池测试信息的在线充电状态估计方法。国际电气杂志。电力能源系统。2014年,63178-184。[谷歌学者][交叉参考]
徐,J。;李,S。;Mi,C。;陈。;Cao,B.基于Soc的电池单元平衡,具有新颖的拓扑结构和减少的组件数量。《能源》2013,62726–2740。[谷歌学者][交叉参考]
邹。;徐,J。;Mi,C。;曹,B。;Chen,Z.基于模型的锂离子电池充电状态估计方法的评价。能源2014,75065–5082。[谷歌学者][交叉参考]
徐,J。;Mi,C。;曹,B。;邓,J。;陈。;李,S.基于比例积分观测器的锂离子电池充电状态估计。IEEE Trans。车辆。Technol。2014年,631614–1621。[谷歌学者]
盛,H。;肖,J.电动汽车充电状态估计:非线性相关和模糊支持向量机。J.Power Sour。2015年,281,131–137。[谷歌学者][交叉参考]
Chang,W.-Y.使用RBF神经网络、OLS算法和AGA相结合的混合方法估计LFP电池的充电状态。国际电气杂志。电力能源系统。2013年,53603–611。[谷歌学者][交叉参考]
康。;赵,X。;马,J.一种新的用于电池退化过程中电荷状态估计的神经网络模型。Appl。能源2014,121,20–27。[谷歌学者][交叉参考]
任健,F。;Shuai,Z。;晓东,L.基于模糊逻辑的铅酸蓄电池动态充电状态在线估计。2013年8月16日至18日,中国哈尔滨,《2013年国际计量、信息与控制会议论文集》;第447–451页。
刘,X。;吴,J。;张,C。;Chen,Z.一种在动态电流和温度下估计锂离子电池能量状态的方法。J.Power Sour。2014年,270,151–157。[谷歌学者][交叉参考]
何,H。;张,Y。;熊。;王,C.一种新的基于高斯模型的电池状态估计方法:能量状态。Appl。能源2015,151,41-48。[谷歌学者][交叉参考]
王,Y。;张,C。;Chen,Z.一种联合估计lifepo4电池充电状态和可用能量的方法。Appl。能源2014,135,81–87。[谷歌学者][交叉参考]
董。;陈。;魏,J。;张,C。;王,P.一种基于模型的在线方法,用于使用双滤波器估计锂离子电池的能量状态。J.Power Sour。2016年,301277–286。[谷歌学者][交叉参考]
王,Y。;张,C。;Chen,Z.电动汽车中锂离子电池的自适应剩余能量预测方法。J.Power Sour。2016年,305,80–88。[谷歌学者][交叉参考]
赵,K.-H。;陈。;张。;何,J。;黄,G.基于非奇异快速终端滑模观测器的ipmsms永磁去磁在线故障检测。传感器2014、14、23119–23136。[谷歌学者][交叉参考][Pub Med]
黄。;罗。;张。;黄。;赵,K.-H.基于滑模观测器的PMSM驱动系统电流传感器故障诊断。传感器2015,1511027–11049。[谷歌学者][交叉参考][Pub Med]
Singh,A。;Izadian,A。;Anwar,S.基于模型的锂离子电池状态监测。J.Power Sour。2014年,268,459–468。[谷歌学者][交叉参考]
Izadian,A。;Khayyer,P。;Famouri,P.时变参数系统的故障诊断及其在MEMS LCR中的应用。IEEE Trans。Ind.Electron。2009年,56973–978。[谷歌学者][交叉参考]
温。;魏天,C。;Saif,M。;孟峰。;Hai,W.通过luenberger和学习观测器的综合设计实现锂离子电池的同时故障隔离和估计。IEEE Trans。控制系统。Technol。2014年,22290-298。[谷歌学者]
Sidhu,A。;Izadian,A。;Anwar,S.基于自适应非线性模型的锂离子电池故障诊断。IEEE Trans。Ind.Electron。2015年,621002–1011。[谷歌学者][交叉参考]
王博士。;苗,Q。;Pecht,M.基于相关向量和条件三参数容量退化模型的锂离子电池预测。J.Power Sour。2013年,239,253–264。[谷歌学者][交叉参考]
Kozlowski,J.D.使用在线阻抗测量和基于模型的数据融合技术的电化学电池预测。2003年3月8日至15日,美国MT,Big Sky,2003年IEEE航空航天会议论文集;第3257–3270页。
Dey,S。;Mohon,S。;Pisu,P。;Ayalew,B.锂离子电池中的传感器故障检测、隔离和估计。IEEE Trans。控制系统。Technol。2016,99,1-9。[谷歌学者][交叉参考]
刘。;Ahmed,Q。;Rizzoni,G。;何,H.利用结构分析和序列残差生成技术对锂离子电池系统进行故障检测和隔离。2014年10月22日至24日,美国得克萨斯州圣安东尼奥,美国机械工程师协会2014年动态系统与控制会议论文集;第1-14页。
徐,J。;Mi,C.C。;曹,B。;曹,J.一种基于电池阻抗模型的锂离子电池充电状态估计新方法。J.Power Sour。2013年,233,277–284。[谷歌学者][交叉参考]
2016,作者所有;被许可人MDPI,瑞士巴塞尔。本文是根据知识共享归因(CC-BY)许可证的条款和条件分发的开放获取文章(http://creativecommons.org/licenses/by/4.0/)。
分享和引用
MDPI和ACS样式
徐,J。;王,J。;李,S。;曹,B.一种同时检测电流传感器故障和估计电动汽车电池能量状态的方法。传感器2016、16、1328。https://doi.org/10.3390/s16081328
AMA风格
徐杰,王杰,李S,曹波。一种同时检测电动汽车电流传感器故障和估计电池能量状态的方法。传感器。2016年;16(8):1328。https://doi.org/10.3390/s16081328
芝加哥/图拉比安风格
徐,军,王,李世英,曹冰刚。2016年,“一种同时检测电流传感器故障并估计电动汽车电池能量状态的方法”Senso
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
相关推荐: idea中的 debug 中小功能按钮都代表的意思
1.step over 步过—–>一行一行的往下走,如果这一行中有方法那么不会进入该方法,直接一行一行往下走,除非你在该方法中打入断点 2.step into 步入—>可以进入方法内部,但是只能进入自己写的方法内部,而不会进入方法的类库中…
