
基于改进MRAS算法的永磁同步电机参数辨识
-
- 摘 要
- 永磁同步点电机参数辨识算法介绍
- 永磁同步电机数学模型
- 改进MRAS参数辨识算法
- 递推最小二乘法辨识原理
- 递推最小二乘法结合MRAS算法原理
- 仿真结果分析
- 总结
摘 要
在永磁同步电机运行时,电机的电气参数会受到温度以及磁链饱和等因素的影响而产生变化,进而导致控制算法对电机控制效果降低,当电气参数变化较大而控制算法并没有辨识到就会造成电机永久性损坏,即获取电机的电气参数对电机高性能运行有着至关重要的作用。本文针对传统MRAS算法在辨识电机参数时会存在方程欠秩,三个参数辨识值之间相互耦合,相互影响,从而导致辨识结果发散,辨识速度慢。本文提出将传统的MRAS算法与递推最小二乘法结合的分段辨识算法。本文先采用递推最小二乘法辨识出交直轴电感值,再将电感值代入MRAS中辨识定子电阻以及转子磁链,有效解决了传统MRAS在辨识过程中方程欠秩和辨识速度慢的问题,从而提高了永磁同步电机运行时的稳定性。
永磁同步点电机参数辨识算法介绍
永磁同步电机(permanent magnet synchronous motor, PMSM)结构简单、功率密度高等优点,广泛应用在新能源汽车、航空等制动系统。然而想要实现PMSM稳定、高效的控制,最首要的条件就是准确获取电气参数。但是在实际运行中,电机的电气参数会随着电机负载和电机运行温度改变而发送改变,从而导致电机出厂电气参数与电机运行时实际电气参数不一致。
PMSM参数辨识方法主要分为离线识别和在线识别两种。离线识别目前主要有限元分析和实验测量两种方法,由于离线识别并不能实时辨识电气参数,所以研究价值并不大。在线辨识可分为递推最小二乘法、模型参考自适应法、扩展卡尔曼滤波算法以及智能算法,其中模型参考自适应法(Model Reference Adaptive System,MRAS)在电机参数辨识中受到了广泛的关注。MRAS结构简单,搭建算法时需要设计能让系统稳定的自适应规则,使其辨识参数收敛。但是该方法因为方程欠秩,需要设置好合适的增益系数,才能达到快速收敛。
因此,本文提出了一种改进MRAS算法,用于解决PMSM电气参数辨识问题。该算法解决了MRAS在辨识时欠秩问题。将传统MRAS辨识电阻磁链电感参数降低到电阻和磁链参数。而电感参数采用的算法进行辨识,再将辨识结果送到MRAS算法中,从而使MRAS辨识方程达到满秩,进而提高辨识精度和收敛速度,并减少了动态震荡。
永磁同步电机数学模型
PMSM是一种多变量、非线性、耦合强的电气设备,通常采用矢量控制的闭环控制方法[13]。在d-q同步旋转坐标系下,电压方程为:
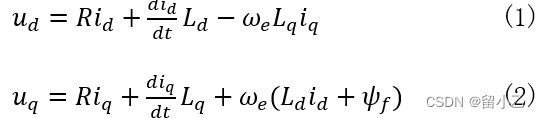
式(1)、(2)中,
分别是d-q轴坐标系下电感、电流以及电压;R为定子电阻; ω_e为电气角速度;ψ_f为永磁体磁链。
本文辨识系统采用永磁同步电机为表贴式,该类型电机d轴电感和q轴电感相等,即有
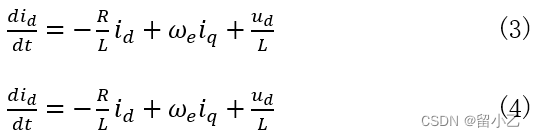
由式(1)、(2)变形化简可得:
改进MRAS参数辨识算法
MRAS参数辨识步骤主要分为五步[14],如图1所示。

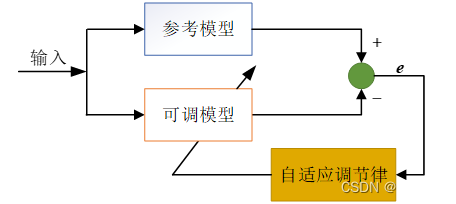
其MRAS算法结构图如图2所示。
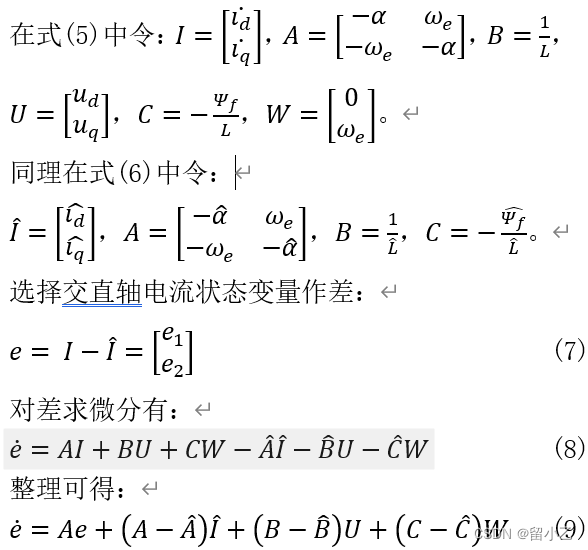
由式(3)、(4)写成矩阵形式可得:

其中α=R/L,于是MRAS算法的参考模型方程可确定为式(5),则可调模型的系统方程为(6)。

由式(5)、(6)可以搭建MRAS的参考模型和可调模型。图3为MRAS算法辨识PMSM电阻、磁链、电感的结构图。

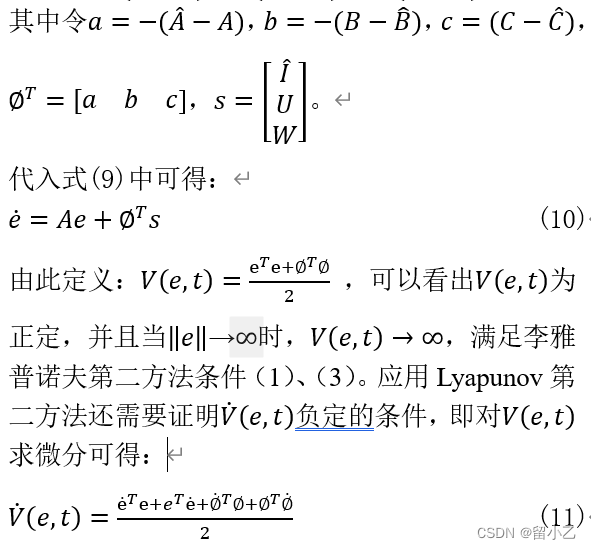
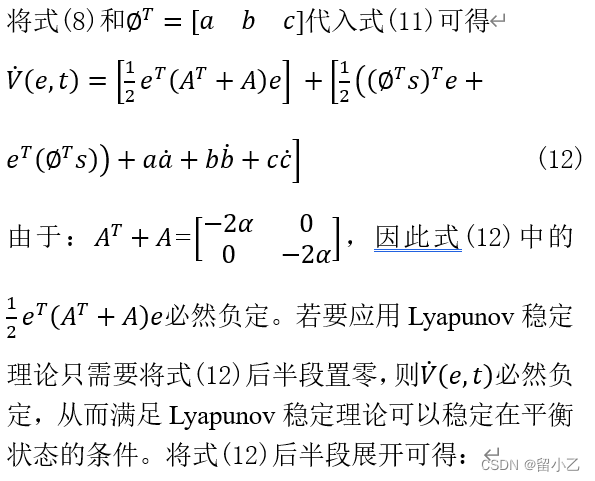
采用Lyapunov稳定理论作为在线辨识参数的自适应调节律[15]。Lyapunov稳定理论可以保证大范围一致渐进稳定于平衡状态,其条件为:
(1)、存在标量函数V(X,t)正定;
(2)、V ̇(X,t)存在且负定;
(3)、当‖X‖→∞时,V(X,t)→∞。
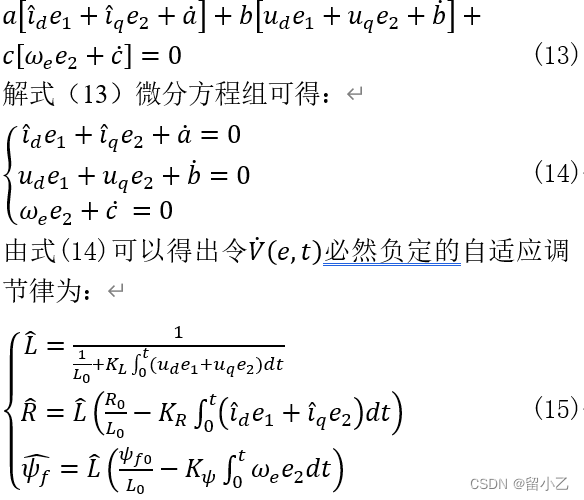
R_0、L_0、ψ_f0为待辨识参数的初始值,K_L、K_R、K_ψ为对应电感、电阻、磁链调节增益系数,适当调节增益系数可以使辨识结果更加精确。L ̂、R ̂、(ψ_f ) ̂分别为辨识的电感、电阻、磁链。i ̂_d 、i ̂_q为MRAS算法预测的d-q轴电流。e_1 、e_2为d-q轴电流真实值和预测值的误差。
递推最小二乘法辨识原理
递推最小二乘法设计简单、收敛速度快、易于移植等特点,使递推最小二乘法应用相当广泛[16]。其基本思想可以概括为:θ ̂(k)=θ ̂(k-1)+修正值。本文采用递推最小二乘法辨识PMSM的电感参数,来弥补传统MRAS算法欠秩问题。
在永磁同步电机参数辨识系统中,被辨识对象可以不断提供新的输入数据,递推最小二乘法可以利用这些新数据来改善电感估计精度。本文利用递推最小二乘法,将实时采集PMSM的交直轴电流电压以及电气角速度作为递推式中的输入矩阵,准则函数估计值来不断修正电感参数,使准则函数值最小化,得出精度较高的电感参数。递推形式的最小二乘估计为:
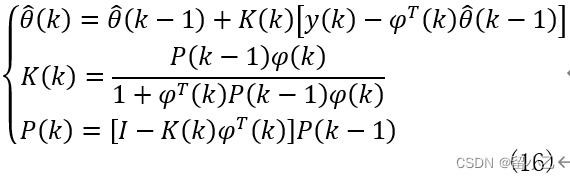
递推最小二乘法算法的步骤为:首先确定初值P(0)、θ ̂(0)以及初始数据;接下来采样当前的y(k)、φ(k);最后利用式(16)计算得出θ ̂(k)、 K(k)、P(k)往下递推[17]。
递推最小二乘法结合MRAS算法原理
由上文对传统MRAS辨识算法分析可知,当电机处于稳态运行时,定子电压方程数只有两个,而待辨识参数有R_s、L、ψ_f,这三个参数间存在着相互耦合的影响,二阶方程辨识3个未知数必然存在欠秩问题[18]。
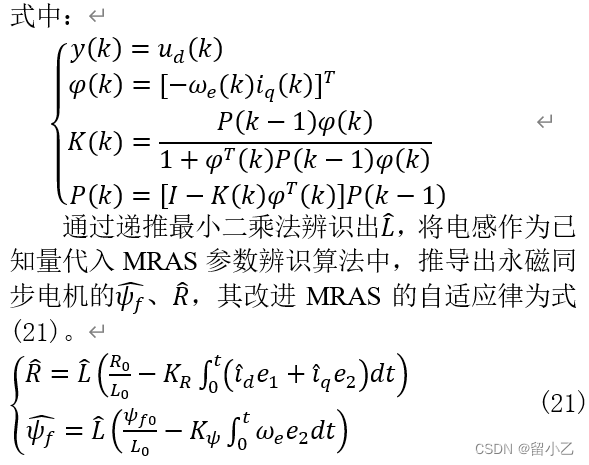
故本文在传统的MRAS基础上进行改进,采用递推最小二乘法与MRAS结合,通过递推最小二乘法辨识出电感参数L ̂,将辨识出的电感参数传入到MRAS中辨识出电阻(R_s ) ̂和磁链(ψ_f ) ̂,从而解决了方程欠秩的问题,结构图为图4所示。
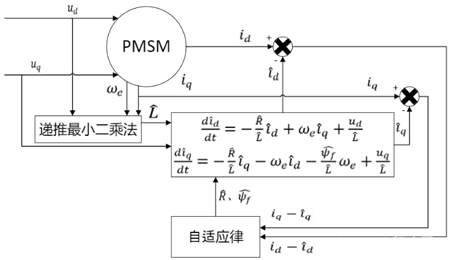
由递推最小二乘法单独辨识出电感值,由于q轴电压方程存在未知参数永磁体磁链,因此采用d轴电压方程来对电感参数进行辨识。

仿真结果分析
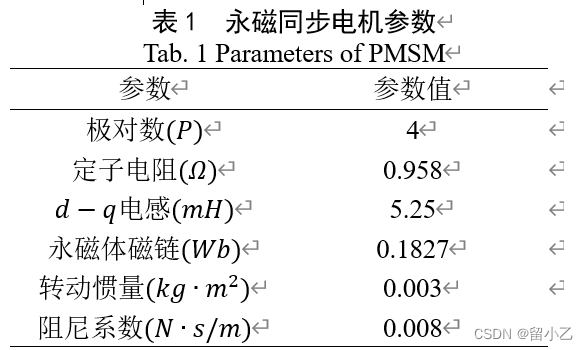
本文基于Simulink平台搭建传统MRAS和优化MRAS算法,对比改进前后的辨识效果,仿真系统中的电机参数如表1所示。
仿真运行时间设置为0.5秒,给定转速为1500rad/min。首先电机以额定转速进行启动,在0.3s时给电机施加5N的负载。为了分析由改进前后对辨识结果的影响,搭建了传统MRAS辨识系统进行对比,辨识结果如图6和图7所示。
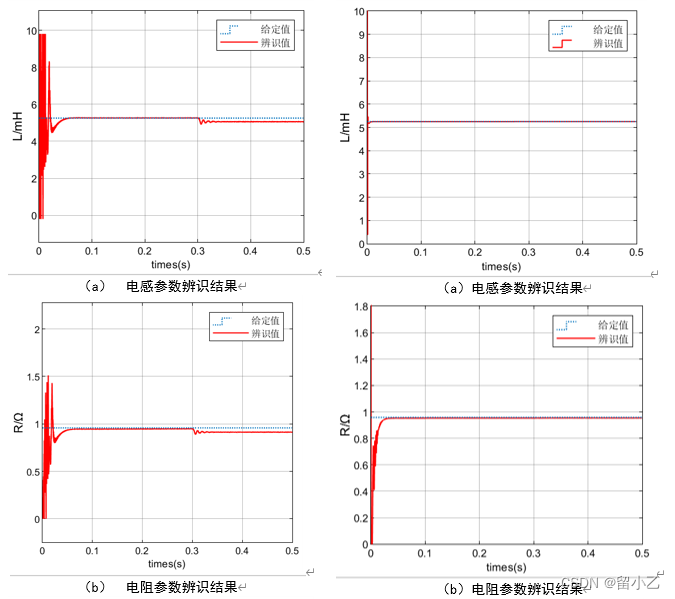
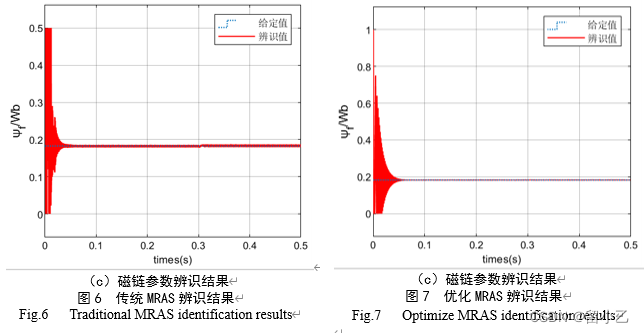
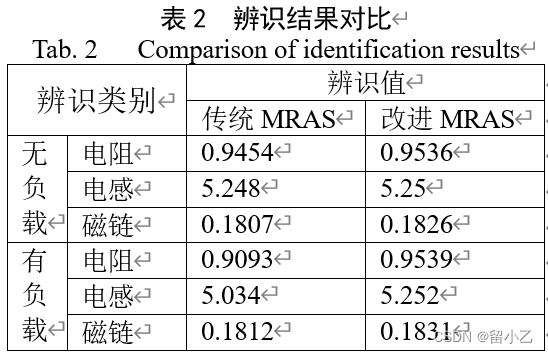
表2为运行稳定后的辨识最终结果对比表,分为有负载和无负载两种情况。由表2对比可以看出优化MRAS在有无负载情况下辨识精度更高,更加接近电机实际参数值,辨识出的电阻电感磁链更加精确。

表3为不同算法辨识结果稳定后所需要时间对比表。由表3观察可知,优化后的 MRAS算法在辨识电感时0.02s内收敛,而传统算法辨识电感在0.06s内收敛。同样优化后MRAS定子电阻在0.03s内收敛,而传统MRAS在0.06s内收敛。而磁链方面收敛速度提升并不明显,略微提升了0.01s。优化后收敛速度整体上更快,和传统MRAS算法而言具有更高的收敛速度。
表4为两种辨识方法在有无负载情况下的辨识误差分析。由表可以分析得出在转矩突变的情况下,改进MRAS算法辨识结果基本无抖动,辨识误差相比传统MRAS算法更小,三参数辨识误差稳定0.5%之内,相较而言在电阻电感参数辨识精度提升了10倍左右,而磁链参数辨识精度也提升了4倍左右,并且没有陷入局部最优情况,由此可以看出改进MRAS算法抗干扰能力能强。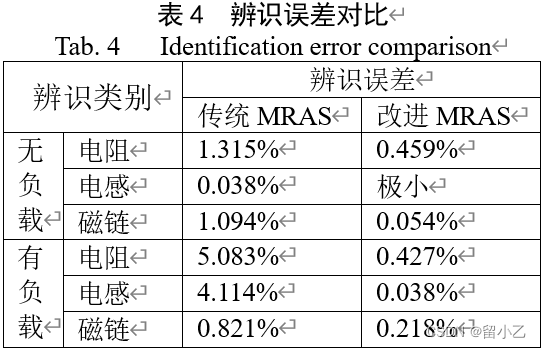
总结
本文根据传统MRAS存在的缺点进行改进,提出了一种改进MRAS的PMSM参数辨识方法,弥补传统MRAS辨识中的缺陷。在Simulink中搭建PMSM参数辨识模型。在仿真中验证了改进MRAS算法的有效性,有效解决了传统MRAS辨识中欠秩引起的辨识结果准确性不佳和收敛速度较慢等问题。
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
相关推荐: 车载软件架构 —— 闲聊几句AUTOSAR OS(二)
我是穿拖鞋的汉子,魔都中坚持长期主义的工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 在最艰难的时候,自己就别去幻想太远的将来,只要鼓励自己过好今天就行了! 这世间有太多的猝不及防,有些东西根本不配占有自己的情绪,人生就是一场体验,请…
