
博客地址:https://www.cnblogs.com/zylyehuo/
基于[移动机器人运动规划及运动仿真],详见之前的博客
移动机器人运动规划及运动仿真 – zylyehuo – 博客园
参考链接
Autolabor-ROS机器人入门课程《ROS理论与实践》
环境配置
ubuntu 18.04
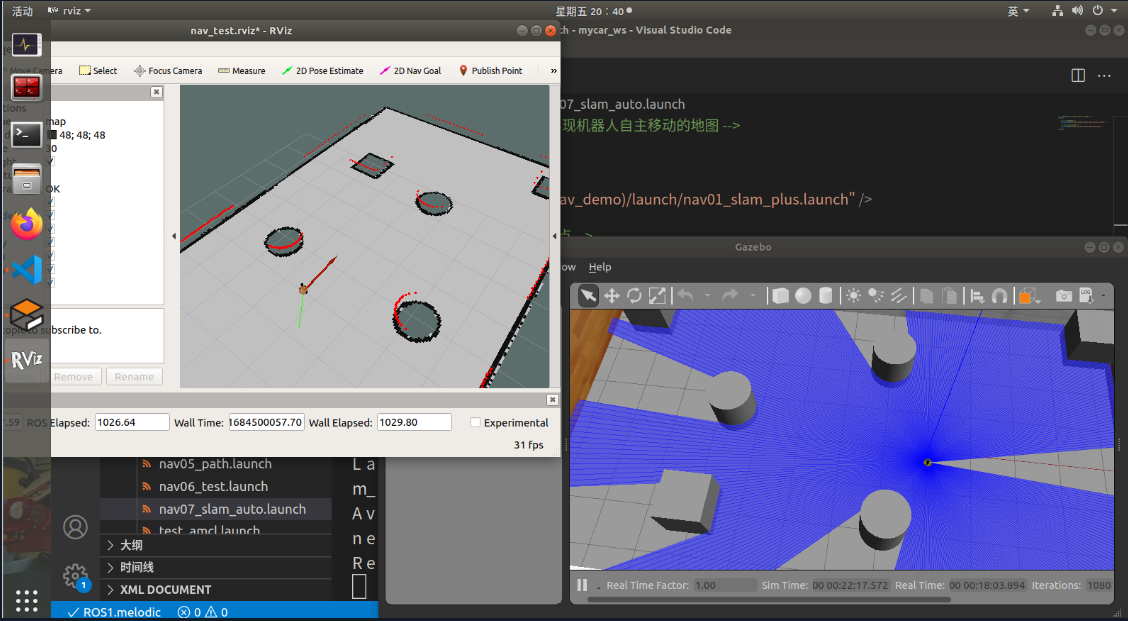
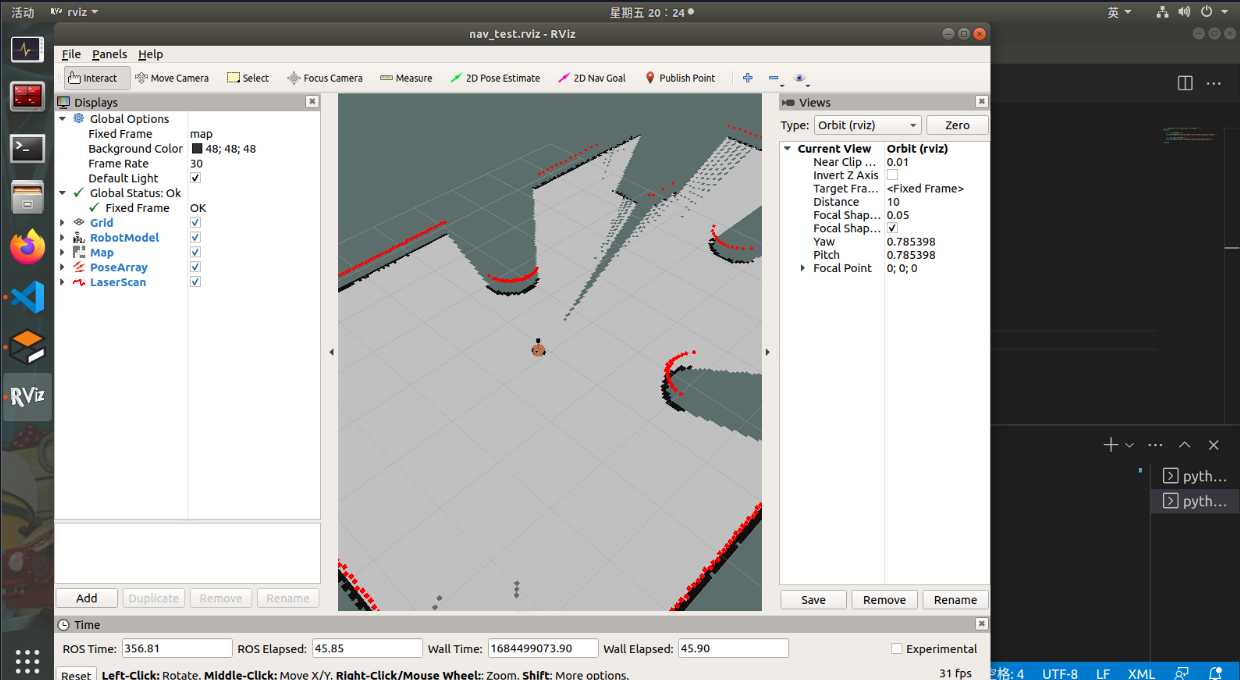
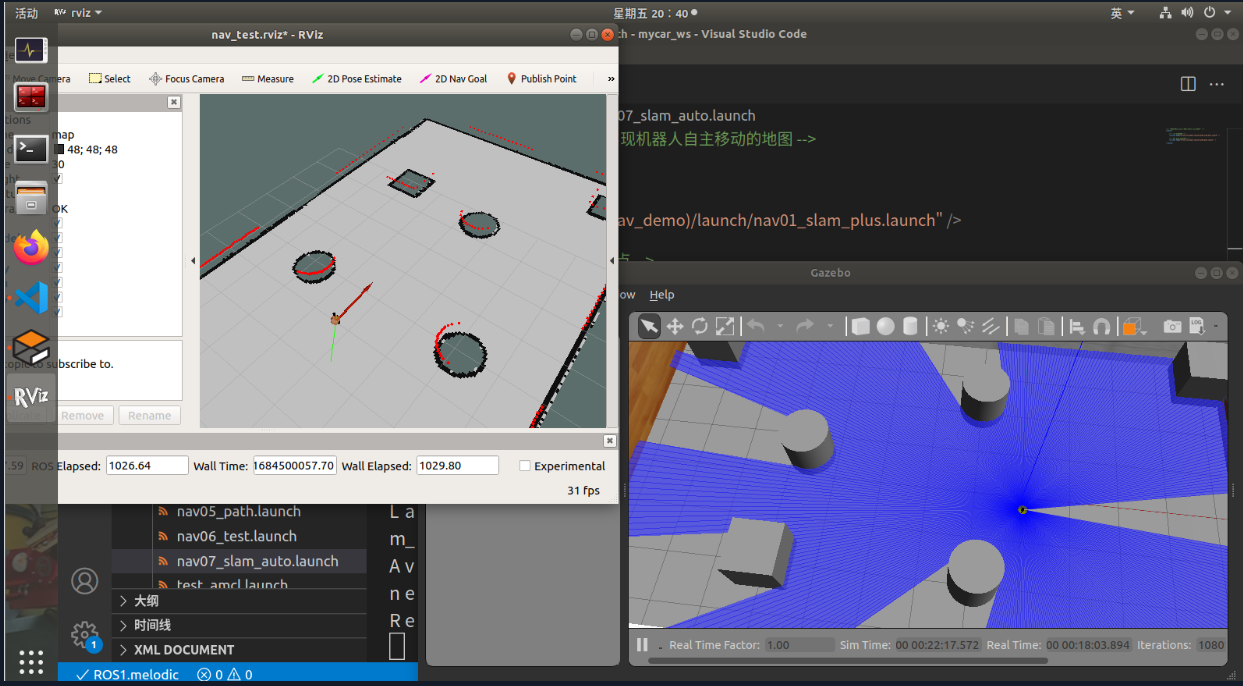
成果图
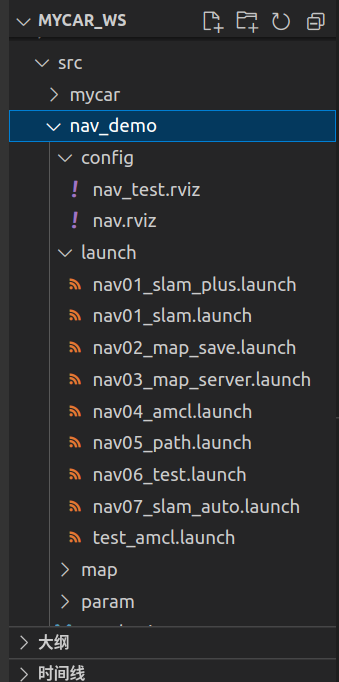
step1: 编写 launch 文件
mycar_ws/src/nav_demo/launch/nav01_slam_plus.launch
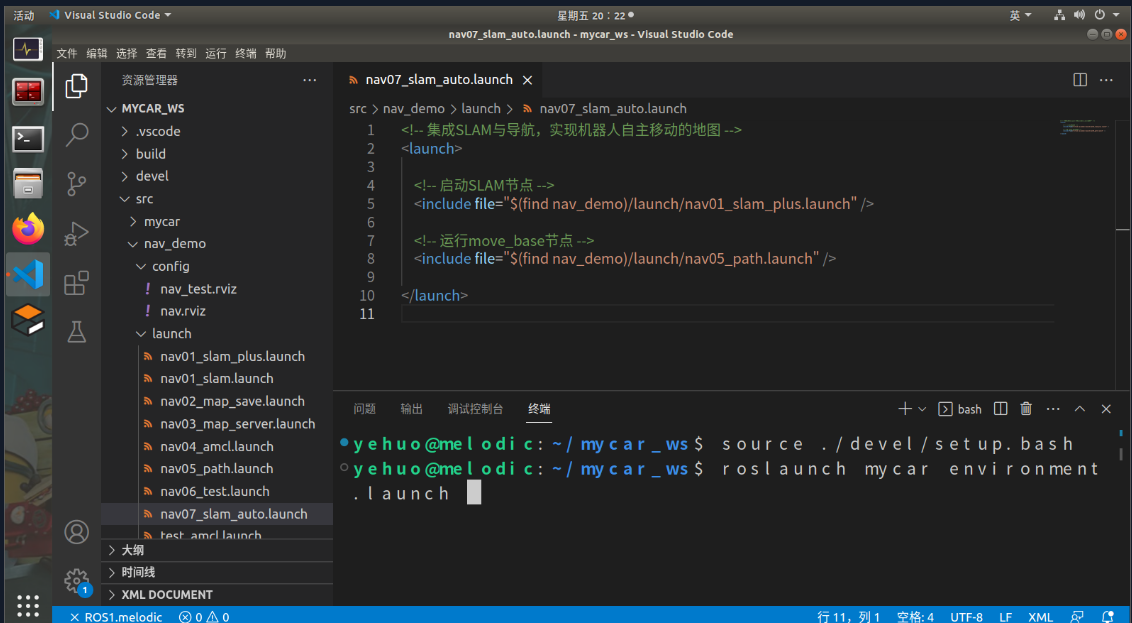
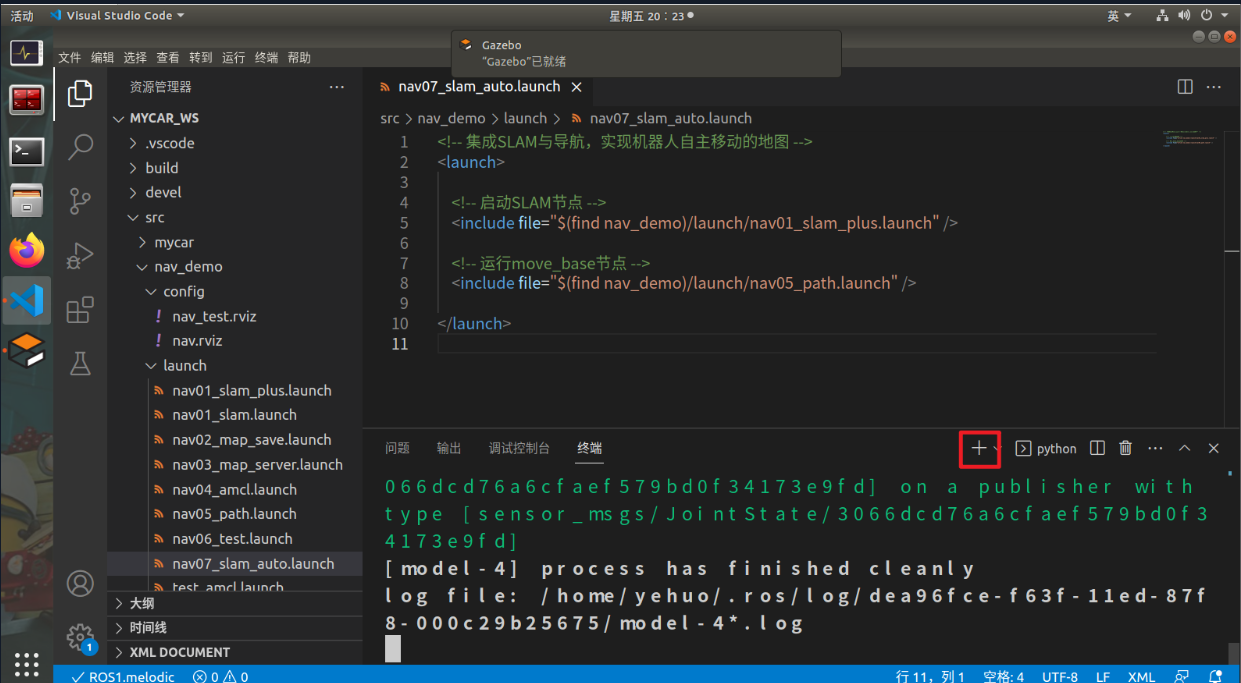
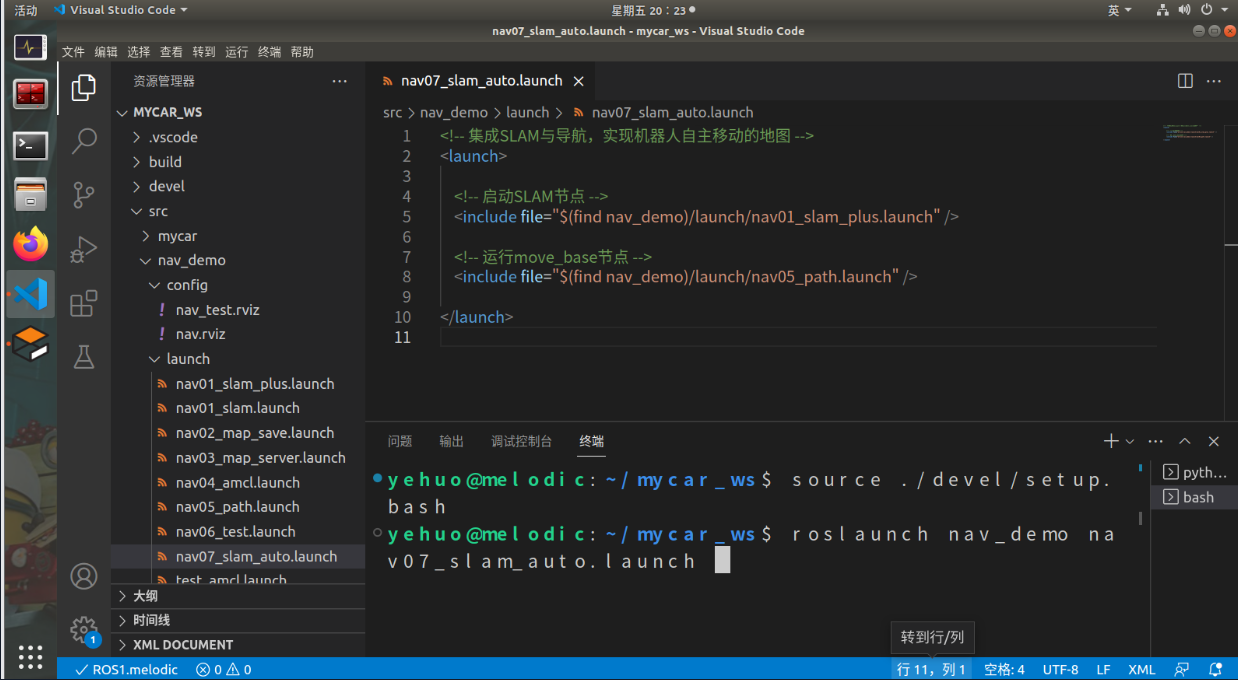
mycar_ws/src/nav_demo/launch/nav07_slam_auto.launch
step2: 编译+启动 gazebo 仿真环境
source ./devel/setup.bash
roslaunch mycar environment.launch
step3: 编译+启动 rviz
source ./devel/setup.bash
roslaunch nav_demo nav06_test.launch
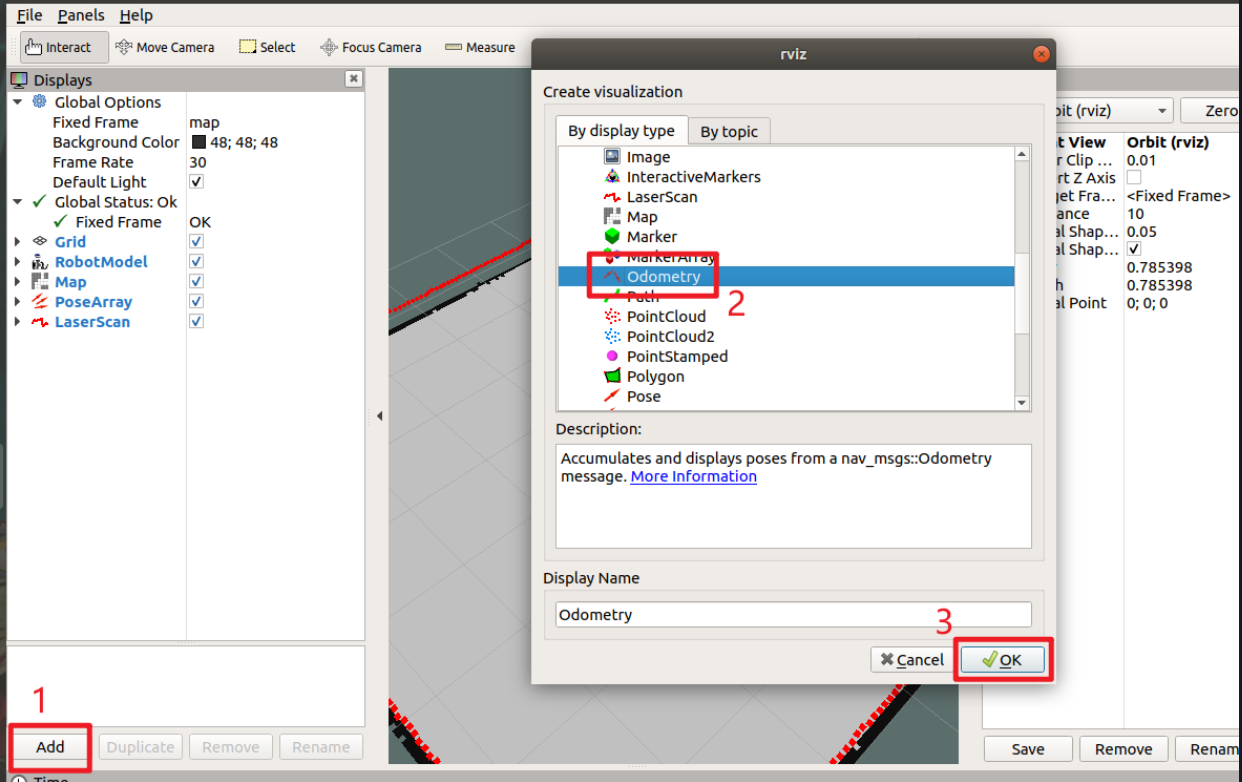
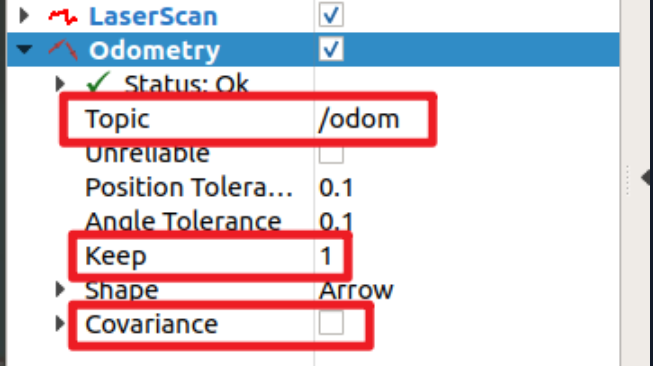
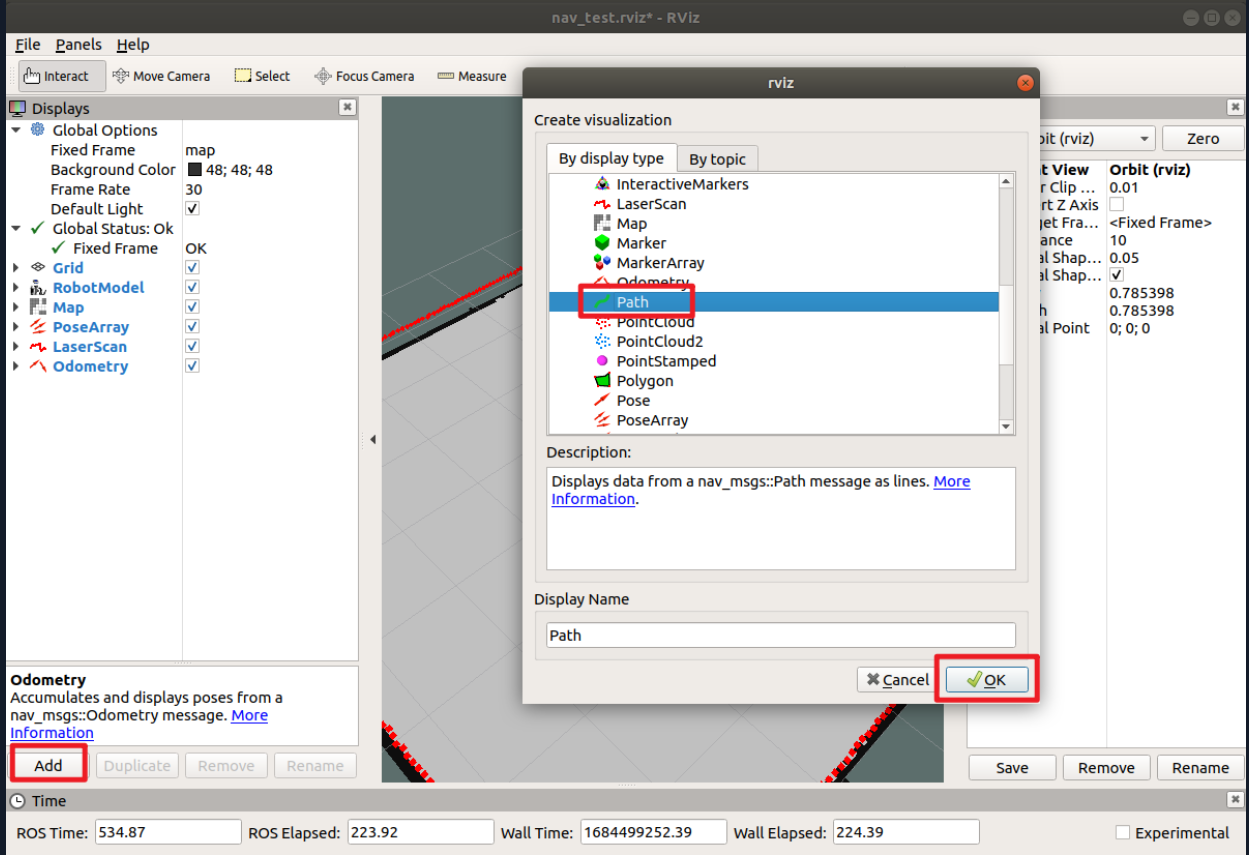
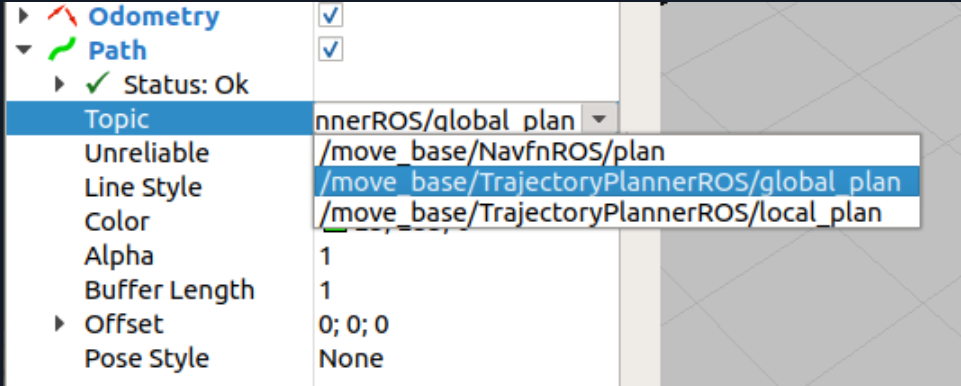
step4: 配置 rviz
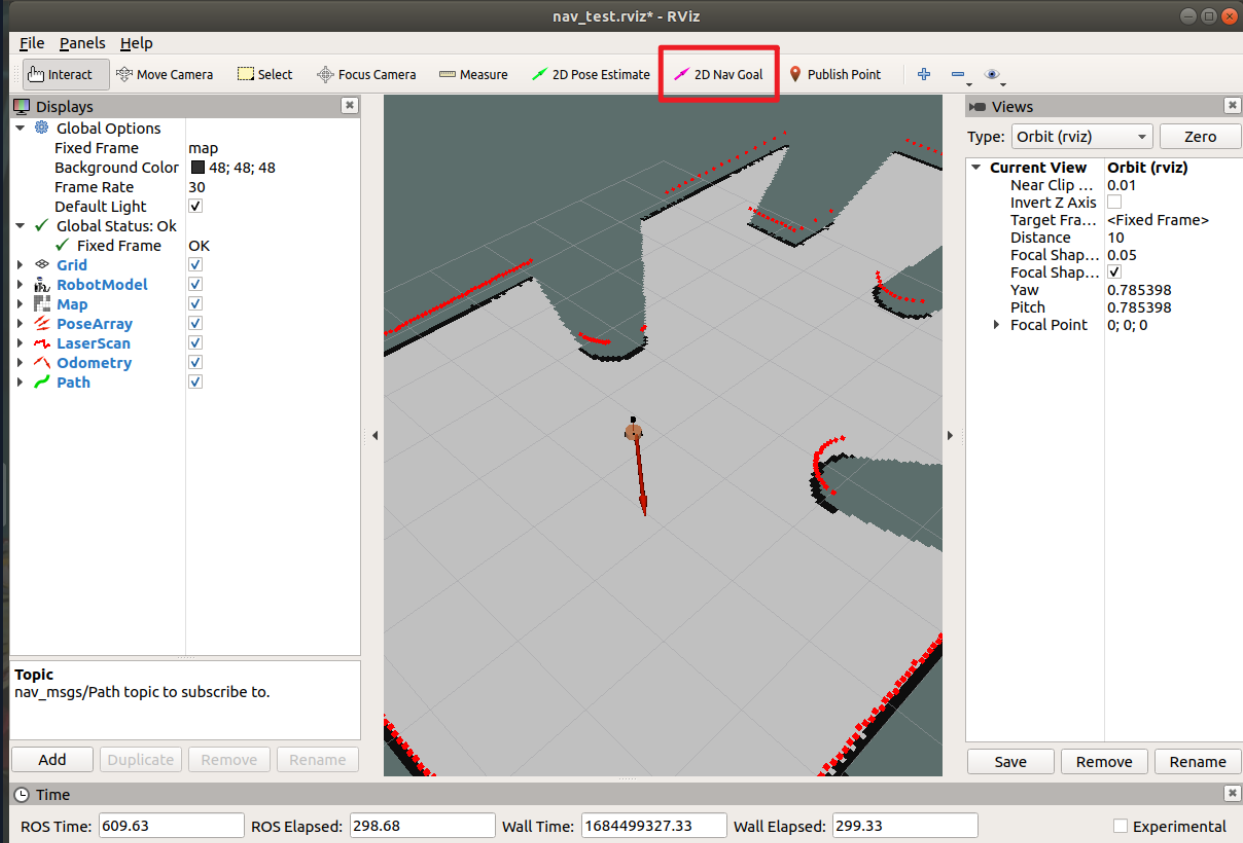
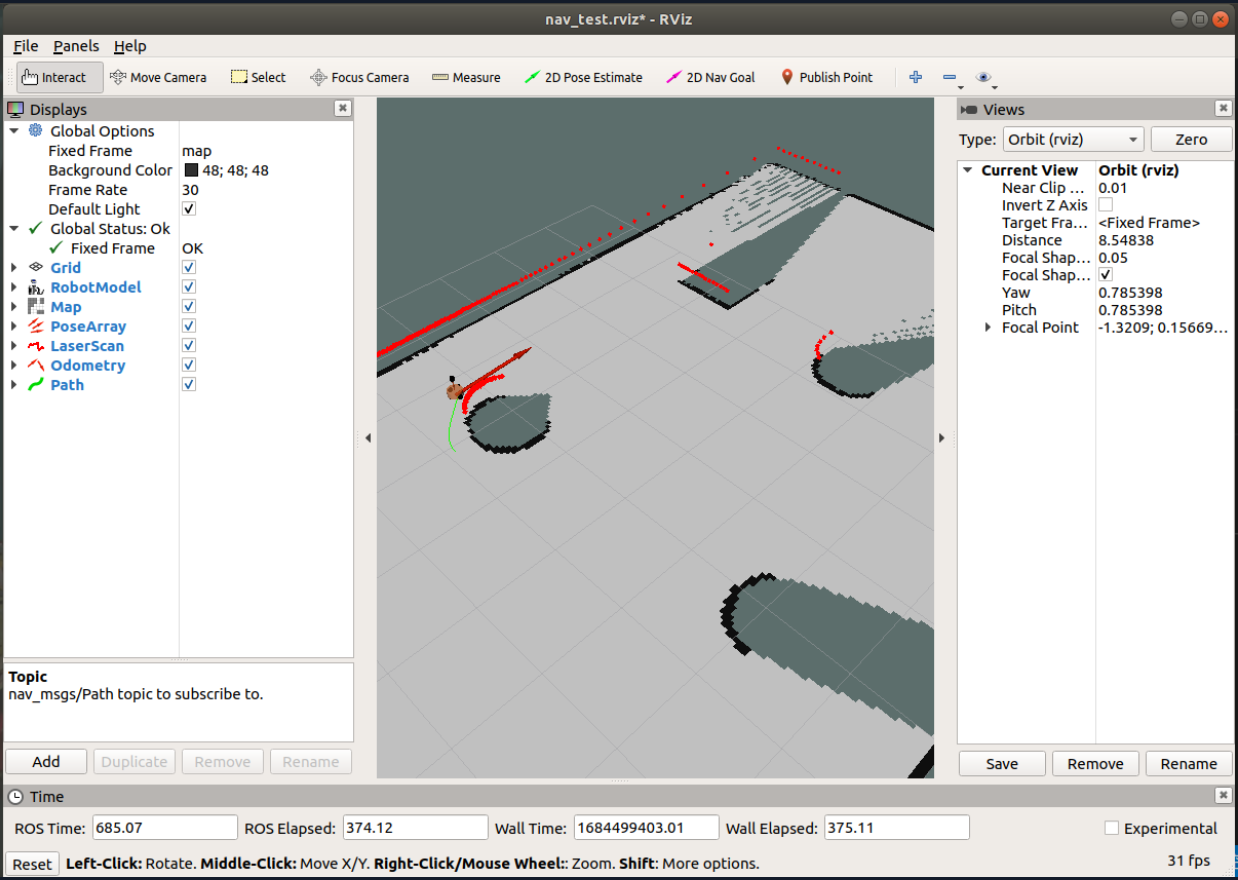
step5: 运行测试
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
