
说明:以下笔记来自计算机视觉life吴桐老师课程:从零掌握GNSS、RTK定位[链接],从零掌握RTKLIB[链接]。非原创!且笔记仅供自身与大家学习使用,无利益目的。
第三讲 GNSS相关时间系统和转换
GPS卫星的位置在时间过程中是变化的,因此在给定GPS卫星的位置坐标时,必须给出相应的瞬时时刻。GPS定位是通过GPS接收机测量和处理GPS卫星发射的信号,来确定观测站(即GPS接收机)至卫星的距离,进而确定观测站的位置。而由观测站至卫星的距离的测定,是通过由卫星到测站的信号传播时间的精确测定再计算出来的,若要求上述距离误差小于1cm,则信号传播时间的测定误差,应不超过3×10^(-11)s
关于时间的描述,必须建立一个时间的测量基准,它是时间的参考系统,包括时间原点(其实历元)和时间单位(尺度),其中时间的尺度是关键,而原点可以根据实际应用加以选定
一般来说,时间参考系统的物理实现必须具有可观测的周期运动,这种周期运动应具备连续性、稳定性和复现性,在不同时间、地点,均可以通过实验和观测,复现周期运动
时间一般由参考框架和表示方法组成,如日常生活中一个时刻,2023年12月19日13:23:41,是指在UTC时间框架下的公历(格里高利历)表示方法
时间单位-原子时秒
现代物理学发现,物质内部原子的跃迁,所辐射或吸收的电磁波频率,具有极高的稳定性和复现性,所以根据这一物理想象所建立的原子时,成为当代最理想的时间系统
1967年定义原子时的尺度标准:国际制秒SI,原子时 秒长 定义为:位于海平面上的铭133原于基态两个超精细能级,在零磁场中跃迁辐射振荡9192631770周所持续的时间,为一原子时秒
时间框架和其时间起点
原子时(AT)
原子时起点定于1958年1月1日0时0分0秒(UT),即规定这一瞬间原子时时刻与世界时刻重合,但事后发现,该瞬时原子时与世界时的时刻之差为0.0039秒,这一差值作为历史事实保留了下来
原子时原点:AT=UT^2-0.0039(s)
原子时的出现,在全球各国获得迅速的应用,但不同地方的原子时之间存在着差异,为此,国际时间局对世界上精选出的100座原子钟进行相互比对,经数据处理推算出统一的原子时系统,称为国际原子时(International atomic time, IAT)
世界时(UT)
地球上零经度子午圈(格林尼治子午圈)所对应的平太阳时(通过观测太阳连续两次经过本地子午圈的时间间隔)且以平子夜为零时起算的时间系统,称为世界时(UT)
世界时是以地球自转为基础定义的,但是地球自转的速度并不均匀,且自转轴的方向在地球内部亦不固定(极移现象),那么地球自转的不稳定性,违背了建立时间系统的基本条件
为了弥补这一缺陷,自1956年以来,便在世界时UT中引入了极移修正项和季节性改正Ts,由此获得的世界时用UT1和UT2来表示,未经修改的世界时用UT0来表示,于是
UT1 = UT0 +
UT2 = UT1 + Ts
协调世界时(UTC)
原子钟发布的原子时,尺度更加均匀稳定,但它并不能完全取代世界时,原因为在地球科学的种种研究中,都涉及地球的瞬时位置,这些都离不开以地球自转为基础的世界时
原子时的秒长比世界时的秒长略短,这就使原子时比世界时每年约快1s(多出1s),两者之差逐年积累,为了避免广播的原子时与世界时之间产生过大的偏差,同时,又要使两种时间系统同时并存,就有必要建立一种兼容两种时间系统各自优点的新的时间
即是从1972年起采用的协调世界时(Coordinated Universal Time, UTC, 简称协调时)
协调世界时(UTC)的秒长,严格等于原子时的时长,采用闰秒(或称跳秒)的方法使协调时与世界时的时刻相接近,当协调时与世界时的时刻差超过0.9s时,便在协调时中引入一闰秒(或正或负),用于纠正,闰秒一般在12月31日或6月30日的最后一秒加入。具体日期由国际时间局安排并通告
协调时与国际原子时之间的关系,如下式所示:
IAT = UTC + 1*n (n为调整参数,其值由国际地球自转服务组织发布)
GPST
GPS时间系统采用原子时系统,以美国海军天文台(USNO)维护的**协调世界时(UTC)**作为基准,GPS时间与原子时AT名义上相差一个常数
AT = GPST + 19.0s
在GPS标准历元1980年1月6日0时,GPS时间与UTC一致,AT与UTC相差整n秒,2014年7月,整数值为35,也就是说GPS时间比UTC早16s
GPS时间系统在标示时间时采用GPS周和周秒来标示GPS系统时间,所采用的最大时间单位为周(week,即604800s),其标示时间的方法是从1980年1月6日0时开始起算的周数(Week Number,WN)加上被称为周内时间(Time of Week, TOW)的从每周周六/周日子夜开始算起的秒数,在GPS卫星所发送的导航电文中,时间信息的标示就是采用这样的形式
BDT
北斗系统的时间基准为北斗时(BDT)
BDT采用国际单位制SI秒为基本单位连续累计,不跳秒,起始历元为2006年1月1日协调世界钟(UTC)00时00分00秒,采用周和周内秒计数,BDT通过UTC(NTSC)与国际UTC建立联系,BDT与UTC的偏差保持在100纳秒以内(模1秒,1s的大周期下),BDT与UTC之间的跳秒信息在导航电文中播报
虽然GPS与BDS都采用原子时作为时间基准,且均属于连续的时间系统,但时间起算点不同,由于UTC存在跳秒,因此GPST和BDT与UTC分别相差整数跳秒,即
BDT = GPST -14s (那么BDT比AT慢19+14s)
GLO时间参考基准
GLONASS时间系统是整个GLONASS系统的时间基准,它属于UTC时间系统,但是以俄罗斯维持的世界协调时UTC(SU)作为时间度量基准,且有一个3小时的时间偏移,即莫斯科与格林尼治时差,即GLONSAAT = UTC(SU) + 3h
GAL时间参考基准
GAL系统使用GPST作为时间参考基准
时间表示方法
- 周+周内秒
- 表示简单
- 在星历中使用
-
星历(Ephemeris):
- 星历是卫星在未来一段时间内轨道上位置的数学模型。它包含了卫星的位置、速度和加速度等信息,用数学公式描述了卫星在轨道上的运动。
- 星历数据是卫星导航系统中接收机用来计算卫星位置的关键信息。这些数据通常由导航卫星定期广播,以便接收机可以根据这些数据计算出卫星的准确位置。
-
历元(Epoch):
- 历元是一个特定的时刻,用于描述卫星轨道参数的瞬时状态。在GNSS中,历元通常用GPS周数(GPS Week)和周内秒(Time of Week,TOW)来表示。
- GNSS卫星的星历数据包含了多个历元的信息,每个历元对应星历数据的一个时间点。接收机使用星历数据来计算卫星在当前时间的位置。
- 格里高利历
- 公历
- 应用广泛
- 年积日
- 年+年内第几日
- GNSS文件命名
- 儒略日
- 从某时刻开始的天数
- 适合科学计算
- 约化儒略日
- 更改起点
- 适合表示
第四讲 观测值的产生和分类
电磁波测距原理
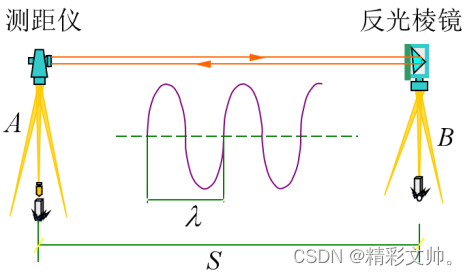
如果已知从A发射到B反射到A接收到信号之间的用时为t,那么有AB之间的距离S
S
=
1
/
2
c
t
S=1/2ct
S=1/2ct
如果已知波长为,从A发射到B反射到A接收到信号之间的一共有N+周期,那么有AB之间的距离S
S
=
2
(
N
+
2
)
{rm{S}} = {lambda over 2}left( {N + {{Delta varphi } over {2pi }}} right)
S=2(N+2)
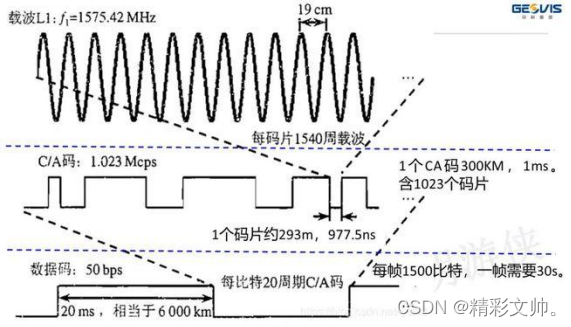
卫星信号
-
载波
- 可以运载调制信号的高频震荡波称为载波
- 在无线电通信中,为了更好地运送信息,我们往往将这些信息调制在高频的载波上,然后再将这些调制波广播出去,而不是直接发射这些信息
-
测距码
- 用于测定从卫星至接收机间距离的二进制码
- GPS卫星中所用的测距码从性质上讲属于随机噪声码,看似一组杂乱无章的随机噪声码,其实是按一定规律编排起来的,可以复制的周期性的二进制序列,且具有类似于随机噪声码的自相关特性
- 导航电文/数据码
- 其由GPS卫星向用户广播的一组反映卫星在空间的位置、卫星钟的修正参数、电离层延迟修正等重要数据的二进制代码,也称数据码

- 其由GPS卫星向用户广播的一组反映卫星在空间的位置、卫星钟的修正参数、电离层延迟修正等重要数据的二进制代码,也称数据码
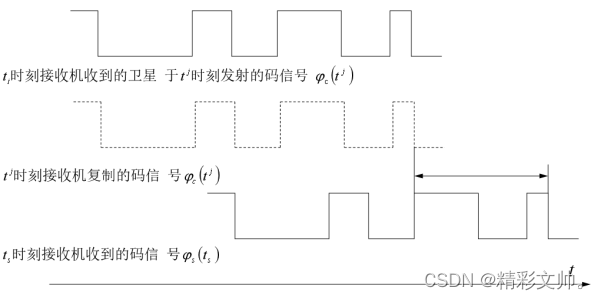
伪距观测量
实际为测量GPS卫星发射的测距码信号(C/A码或P码)到达用户接收机天线的电磁波传播时间t。因此,这种观测方法也称为时间延迟测量
t
j
{t^j}
tj为卫星
S
j
{S^j}
Sj发射信号时的卫星星钟时刻
t
i
{t_i}
ti为用户接收机
T
i
{T_i}
Ti接收到
t
j
{t^j}
tj时刻卫星发射之码信号的站钟时刻
c
(
t
j
)
{_c (t^j)}
c(tj)为卫星星钟
t
j
{t^j}
tj时刻发射之码相位
c
(
t
i
)
{_c (t_i)}
c(ti)为用户接收机于
t
i
{t_i}
ti时刻复制的码相位
在卫星星钟和接收机站完全同步的情况下,同时忽略大气对无线电信号折射的影响,所得到的时间延迟量与光速c相乘,即可得到卫星到GPS接收机天线之间的几何距离(真距离)
R
i
j
=
c
R_i^j = c
Rij=c
实际上卫星的星钟和接收机的站钟不可能完全同步,同时无线电信号经过电离层和对流层由于折射的影响也均有附加延迟,所以实际测量的距离不是真实距离,而是含有误差的伪距,以符号
P
i
j
{P_i^j}
Pij表示
P
i
j
{P_i^j}
Pij代表卫星j到接收机i的伪距观测量
接收机复制的测距码和接收到的卫星发射的测距码在时间延迟器的作用下相关时(对齐时),根据经验,相关精度约为码元宽度的1%。对于C/A码来讲,由于其码元宽度约为293m,所以其观测精度为2.9m
对于P码来说,其码元宽度是C/A码码元宽度的1/10(29.3m),所以其测量精度也就比C/A码的测码精度高10倍,为0.29m,因此有时也将C/A码称为粗码,P码称为精码(都是测距码)
但对于粗码来说,采用**窄相关间隔(Narrow Correlator Spacing)**技术后测距精度可达分米级,与精码的测距精度大体相当
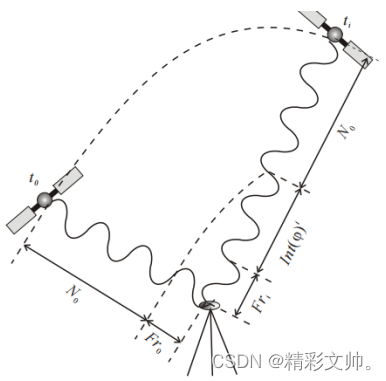
载波观测量
载波只是一种单纯的余弦波,不带有任何识别标志,所以在第一次进行载波相位测量时,接收机实际上能测量的只是不足整周的小数部分
F
r
0
{F_{r0}}
Fr0
初始观测历元
t
0
{t_0}
t0,载波的观测值为(单位为周)
(
t
0
)
=
N
(
t
0
)
+
F
r
i
(t_0) = N(t_0) + F_{ri}
(t0)=N(t0)+Fri
其中
N
(
t
0
)
{N(t_0)}
N(t0)为整周模糊度
那么在下一时刻
t
i
{t_i}
ti
(
t
i
)
=
N
(
t
0
)
+
F
r
i
+
I
n
t
(
)
i
(t_i) = N(t_0) + F_{ri} + Int()^i
(ti)=N(t0)+Fri+Int()i
其中
I
n
t
(
)
i
{Int()^i}
Int()i为由时刻
t
0
{t^0}
t0到
t
i
{t^i}
ti接收机整周计数部分,可以通过信号跟踪计算得到
由于载波频率高,波长短,所以载波相位测量精度高,若测相精度为1%,则对于L1载波来说,波长
1
=
19
c
m
{_1=19cm}
1=19cm,测距精度为0.19cm;对于L2载波来说,波长
1
=
24
c
m
{_1=24cm}
1=24cm,其测量精度为0.24cm。由此可见,利用载波相位观测值进行定位,精度要比伪距定位精度要高几个数量级,故载波相位观测方法常被用于精密定位和载波姿态测量中
多普勒观测量
如下图所示,一个静止不动的信号发射塔向外播发频率为f的信号,而接收机以速度v运行,那么由于信号发射源与接收机之间相对运动所引起的多普勒效应,接收机接收到的信号频率f发生了变化,它不再等于信号的发射频率f,而是
f
+
f
d
{f+f_d}
f+fd,其中
f
d
{f_d}
fd称为多普勒频移,它定义为信号接收频率
f
r
{f_r}
fr与信号发射频率f之间的差值,即
f
d
=
f
r
−
f
{f_d = f_r – f}
fd=fr−f
同时如果我们已知载波的运动速度v和信号入射角度
F
d
=
v
cos
=
v
c
f
cos
{F_d} = {v over lambda }cos beta = {v over c}fcos beta
Fd=vcos=cvfcos
式中,是与信号发射频率f相对应的信号波长,c为光速,而为信号入射角,即从接收机的运动方向到信号入射方向的夹角
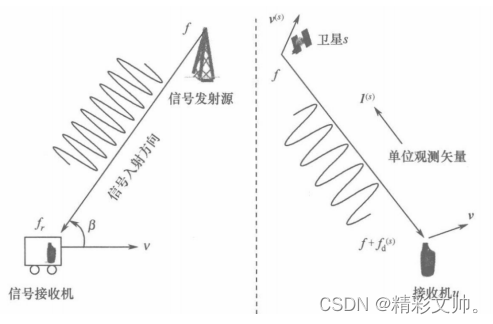
很容易进一步推导出在移动型信号发射源情形下的多普勒频移计算公式,如上图,假设作为移动型信号发射源的卫星s的运行速度向量为
v
8
{v^8}
v8,发射信号的载波频率为f而接收机运动速度为v,那么接收信号的载波多普勒频移值
f
d
8
{f_d^8}
fd8为
f
d
8
=
(
v
−
v
8
)
⋅
I
8
=
−
(
v
−
v
8
)
⋅
I
8
=
−
r
f_d^8 = {{(v – {v^8}) cdot {I^8}} over lambda } = – {{(v – {v^8}) cdot {I^8}} over lambda } = – {{dot r} over lambda }
fd8=(v−v8)⋅I8=−(v−v8)⋅I8=−r
其中
I
8
{I_8}
I8为卫星s在接收机u处的单位观测向量,
r
{dot r}
r代表卫星与接收机之间几何距离r对时间的导数。如果我们已知卫星信号的多普勒频移
f
d
8
{f_d^8}
fd8,并利用卫星星历计算出卫星速度
v
8
{v^8}
v8,那么接收机的运动速度就能被计算出来,实现接收机定速
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
相关推荐: 社区供稿 | Mixtral-8x7B Pytorch 实现
0.前言 本文从代码角度来谈下Mixtral 8x7B混合专家Pytorch的实现 1.论文概述 Mixtral-8x7B引爆了MoE的技术方向,更多针对MoE优化的Trick出现,回归模型本身来解析: Mixtral 8x7B采用了 sMoE模型结构,模型的…
