
1、材料准备
开发板:正点原子STM32F407ZGT6探索者
舵机:SG90
舵机线材分辨:褐色 / 红色 / 橘黄色 —— GND / VCC / PWM_signal
与开发板接线:褐色 / 红色 / 橘黄色 —— GND / +5V / PF6(任选的PF6)
2、知识准备
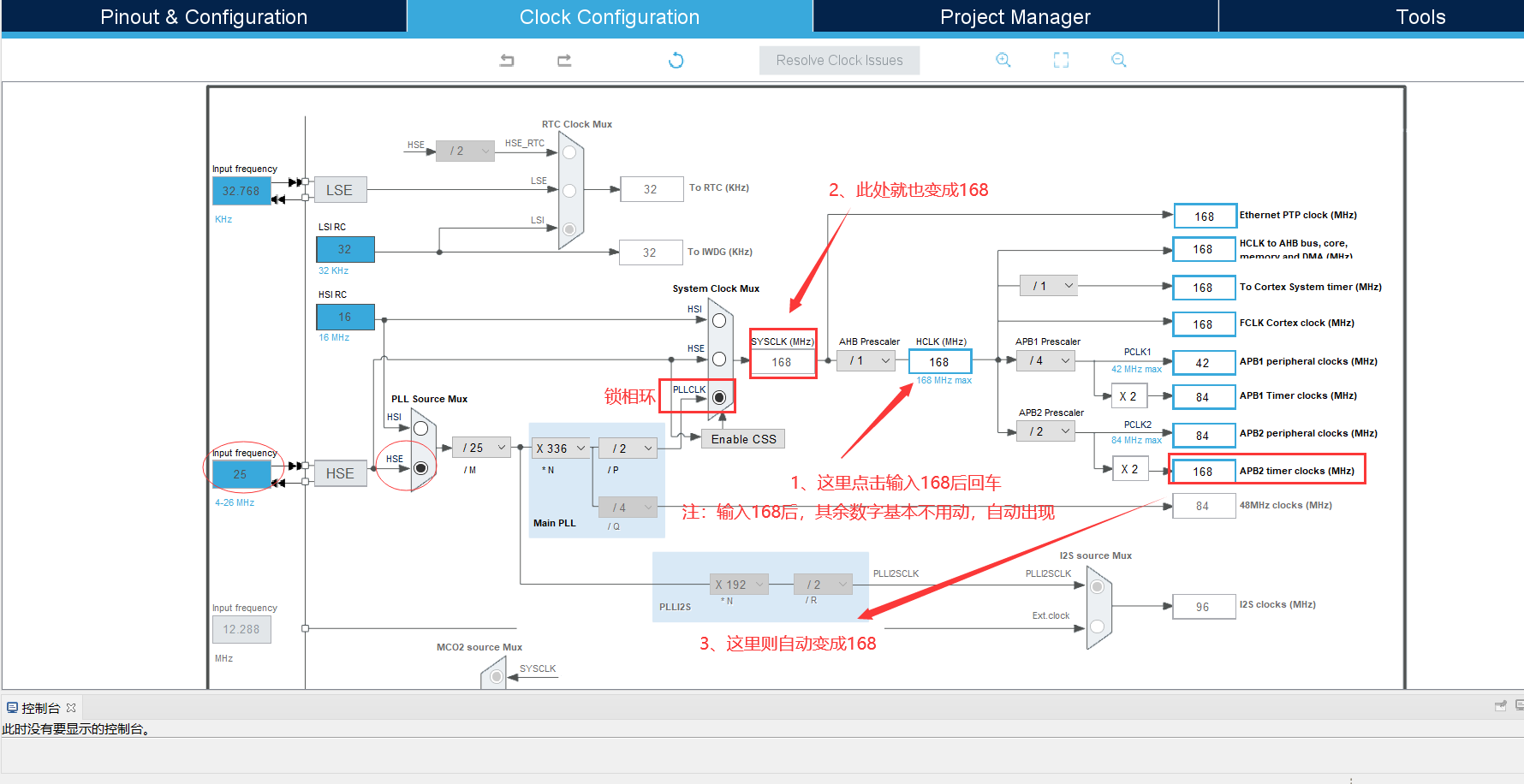
2.1、舵机需要的信号频率为50HZ,对应周期是 0.02 ,所以 arr 设置为 20000 -1 ,psc 设置为 168-1,原因是这么设置可刚好按如下算出频率是50HZ;
2.2、定时器工作频率 Ft = 84 MHz ,单位:Mhz,来源:此次任选采用PF6针脚,而PF6可重映射到TIM10_CH1,而TIM10挂载在APB2上,APB2上的定时器时钟频率是168HZ(前提是这块开发板的SYSCLK直接设置到最大频率168MHz)。还想看168的图解来源请直接打开CuceMX或CubeIDE在“时钟树配置栏目”看到。
2.3、计算方法
定时器溢出时间计算方法: Tout = ( (arr + 1) * (psc + 1) ) / Ft us.
周期 = (2 0000 * 168)/ (168 000 000) = 0.02 秒;
频率 = 1 / 周期 = 50 HZ ;
3、代码块
gtim.h
gtim.c
main.c
4、注释:
4.1、此块代码可以直接拿去用,也可以按照需求改 main.c 里 while(1) 里面的语句完成自定义控制。
4.2、PF6 与 “ATK MODULE” 处插 “ WIFI模块——正点原子ATK ESP 01 ” 占用冲突,请务必取下WIFI模块再拷贝代码运行或者非要用WiFi模块那就不用PF6改用其他带定时器pwm输出的引脚。
服务器托管,北京服务器托管,服务器租用 http://www.服务器托管网fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
相关推荐: 从驾考科目二到自动驾驶,聊聊GPU为什么对自动驾驶很重要
“下一个项目,坡道起步。” …… “考试不合格,请将车子开到起点,重新验证考试。你的扣分项是:起步时间超30秒:扣100分。行驶过程中车轮轧到边线:扣100分。” 想必经历过驾驶证考试的同学,对科目二的坡道起步都有说不清道不明的情感。我在坡道起步项目上连续“挂…
