
GEOMETRIC DUAL-DOMAIN GRAPH CONVOLUTION NETWORK FOR POINT CLOUD DENOISING
用于点云去噪的几何双域图卷积网络
摘要
我们提出了GeoGCN,一种用于点云去噪(PCD)的新型几何双域图卷积网络。在传统的PCD智慧之外,为了充分利用点云的几何信息,我们定义了两种表面法线,一种叫做真实法线(RN),另一种叫做虚拟法线(VN)。RN保留了噪声点云的局部细节,而VN避免了去噪过程中的全局形状收缩。GeoGCN是一种新的PCD范式,1)首先在VN的帮助下通过基于空间的GCN回归点的位置,2)然后通过对回归点进行主成分分析来估计初始RN,3)最后通过基于正态的GCN回归精细RN。与现有的PCD方法不同,GeoGCN不仅利用了两种几何专业知识(即RN和VN),而且还受益于训练数据。实验证明,GeoGCN在噪声稳健性和局部及整体特征保存方面都优于SOTA。
1. 前言
近年来,随着自动驾驶和Metaverse的广泛应用,点云已经越来越受欢迎[1]。它们通常由先进的三维传感器获取,由于测量和重建误差,噪声不可避免地会渗入。噪声会降低捕获的表面的准确性,在许多几何任务之前应该减少噪声。
给定一个带有噪声的测量值P *= (P + ),点云去噪(PCD)的目的是恢复一个干净的点云P来代表采样的底层表面。目前的PCD方法大致分为传统方法和基于学习的方法。前者可以利用某些表面假设,如稀疏性或非局部相似性,来消除噪声,同时试图保留表面的几何形状[2, 3, 4, 5]。然而,它们很耗时,并且需要仔细的试错参数调整。近年来,人们在基于学习的方法方面做出了大量努力[6, 7, 8]。它们通常以反映局部几何形状的小斑块作为输入,对几何信息进行编码并预测每个点的位移。很少有基于学习的PCD方法能够从全局几何中获益,以提高去噪的性能。
我们提出了一种新的有效的PCD方法,利用几何学专业知识并从训练数据中获益。我们的方法受到以下两个观点的启发。
(1)局部几何学有助于平滑局部的噪声点,同时保留尖锐的特征;全局几何学有助于约束噪声点云的整体形状。因此,这两类几何学有可能结合起来,相互补充,促进PCD的性能。基于上述分析,我们定义了两类法线作为表面几何信号。真实法线(RN)和虚拟法线(VN)。RNs是局部估计的,用来保留局部细节,VNs是全局估计的,用来约束全局形状。
(2) 去除噪声的点云比其噪声版本能更准确地估计其表面法线。同时,更准确的表面法线可以比其原始表面法线更好地去除噪声。因此,我们设计了一个级联的双流网络,首先对点坐标进行回归,然后对点法线进行回归,其中RN和VN被整合在一起。回归后的点坐标可用于通过PCA估计初始RN。回归的RNs可以用来拟合新的点坐标,从而得到最终的PCD结果。
我们的主要贡献有以下几点。(1) 我们定义了两种类型的表面法线。RN被用来更新顶点坐标以优化噪声点云的局部细节,而VN被用作损失函数以约束噪声点云的全局形状。(2) 我们提出了一种基于双域图卷积的新型点云去噪范式,它从空间域和法线域学习去掉的RN和VN,并合成RN和VN以提高PCD性能
2.METHOD
2.1. 概述
目前的网络结构很少利用几何学专业知识。在我们的PCD方法中,我们利用了两种几何学专业知识。(1) 我们制定了分别代表局部和全局几何的RN和VN,并将它们自然地整合到动态图卷积神经网络(DGCNN)中[9],以提高去噪效果。(2) 我们同时建立了 “点到法线 “和 “法线到点 “关系。这两种关系使我们的方法对噪声具有鲁棒性,并忠实于底层无噪声的表面。
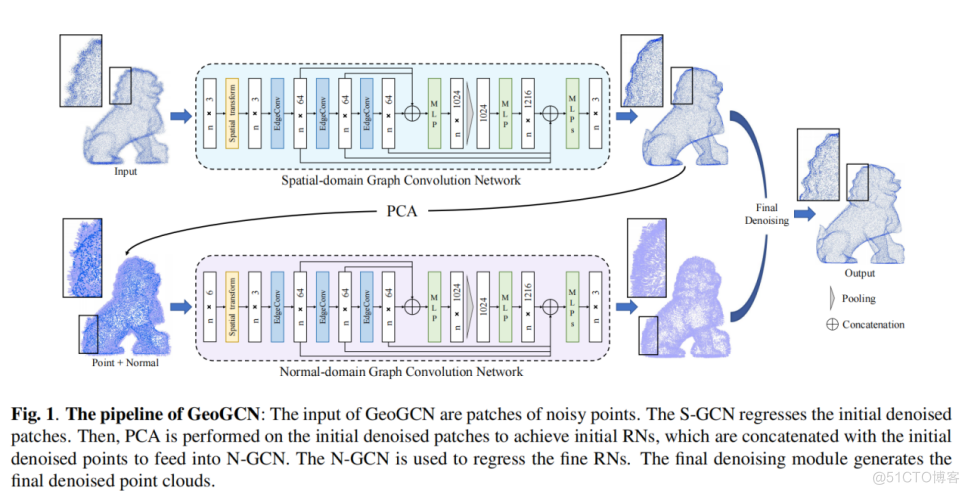
GeoGCN由两部分组成(见图1)。空间域图卷积网络(S-GCN)和正常域图卷积网络(N-GCN)。首先,S-CCN将噪声点云的一个斑块作为输入,对初始去噪斑块进行回归。定义的VNs被用作损失函数来约束点云的形状。然后,我们对初始去噪斑块进行主成分分析(PCA)[10],以获得初始RN。最后,我们将初始去噪点和相应的RNs串联起来,并将其送入N-GCN以生成精细RNs。精细RNs被用来更新初始去噪点的顶点坐标,以优化局部细节。
2.2. S-GCN
S-GCN是空间域的一个子网络。我们将噪声点云的一个斑块输入到S-GCN中,对初始去噪斑块进行回归。通过两个损失函数,我们在全局和局部几何中对训练过程进行约束。
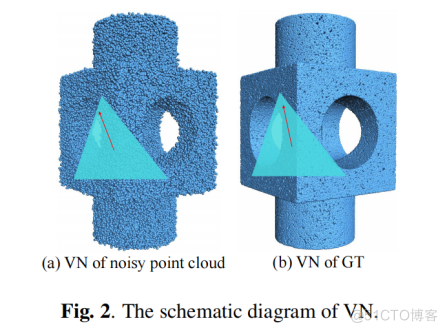
虚拟法线。我们将虚拟法线(VN)表述为一个给定点云的全局几何。为此,我们通过在点云中随机抽取三个点来构建一系列的三角形,并将这些三角形的法线视为虚拟法线(见图2)。这些虚拟法线能够在去噪过程中保留全局形状。
具体来说,我们在S-GCN输出的初始去噪点云中随机选择N组三点。我们采取两个限制条件来确保VNs能够很好地反映点云的全局几何信息。首先,每组中的三个点不应该形成一条线。我们控制每个三角形的三个角度,以避免薄的三角形。因此,任何三角形的三个角度都在[45◦ , 90◦]范围内。第二,每个三角形的边缘长度应长于预先固定的阈值,因为边缘长度短的三角形对噪声敏感。
损失。在选择了N组满足限制条件的三点后,我们标记它们的索引并在干净的点云中找到相应的点。虚拟法线损失被制定为约束点云的全局形状,即:

其中 是来自初始去噪点的VN,
是来自初始去噪点的VN, 是来自清洁点云的VN。
是来自清洁点云的VN。
我们还制定了Earth Mover Distance(EMD)[11]来回归S-CCN的坐标,即

其中,P和Q分别代表S-CCN输出的初始去噪点云和地面实况。 代表P的第i个点到Q的第j个点的距离。
代表P的第i个点到Q的第j个点的距离。 表示是否将P的第i个点移动到Q的第j个点。EMD代表将P的所有点移动到Q的所有点的总成本。
表示是否将P的第i个点移动到Q的第j个点。EMD代表将P的所有点移动到Q的所有点的总成本。
2.3. N-GCN
N-GCN是法域中的一个子网络。我们将PCA计算的初始去噪点和相应的RN串联起来,然后将其送入N-GCN,生成精细的RN。
真正的正态。主成分分析(PCA)被用来分析噪声点周围局部结构的协方差。真实法线是对应于协方差的最小特征值的特征向量。这种法线可以很好地反映一个点的局部几何结构。
损失。PCA法线是没有方向的,获得一致的法线方向需要额外的努力。我们的解决方案是将预测的RNs与地面实况相加或相减,其中采用较小的值。这样的操作保证了回归的RNs更接近于与地面实况的直线。因此,我们将N-GCN中回归RN的L2损失表述为

其中代表N-GCN输出的RN,为GT.
2.4. 总损失
总损失被表述为

其中和是权重。我们根据经验设定=0.9,=0.1,在去噪期间表现良好。
2.5. 最终去噪
为了获得更准确的点云去噪结果,我们利用回归的RNs来拟合回归的点。最终的去噪点是由[12]产生的

其中 和
和 是去噪后和去噪前的点,N是p邻接点。
是去噪后和去噪前的点,N是p邻接点。


是一个权重函数,=0.5,

是步长,迭代次数设为10。
3. 结果和讨论
3.1. 数据集
训练数据集由22个具有精确坐标和法线的点云模型组成,包括11个CAD模型和11个非CAD服务器托管网模型。每个模型包含从其原始表面随机采样的100k个点。我们在每个模型中加入不同尺度的高斯噪声,噪声尺度分别为0.25%、0.5%、1%和1.5%。因此,训练数据集包括88个有噪声的点云模型和22个有准确坐标和法线的点云模型。
测试数据集包括合成的噪声模型和真实扫描的模型。对于合成的数据,我们添加了比例为0.5%的高斯噪声。此外,我们还测试了5个真实扫描的点云。
3.2. 训练细节
我们的GeoGCN是由PyTorch实现的。我们在配备了英特尔12700F CPU和英伟达RTX-1080Ti GPU的PC上进行训练。我们利用SGD优化器,批量大小为64。在每个模型中选择8000个斑块来输入GeoGCN,每个斑块有1000个点。我们将训练历时和初始学习率分别设定为10和1e-3。当历时增加时,学习率从1e-3下降到1e-6。训练我们的GeoGCN大约需要15个小时。
3.3. 定量比较
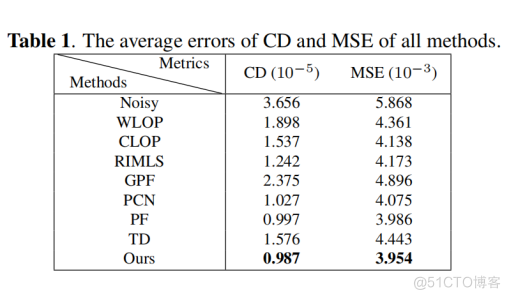
我们将提出的GeoGCN与点云去噪方法进行比较,包括传统的,即WLOP[13],CLOP[14],RIMLS[15],GPF[16],以及基于学习的,即PCN[17],Pointfilter[18],和TD[19]。
为了全面评估GeoGCN,我们计算了测试数据集的Chamfer距离(CD)[20]和平均平方误差(MSE)[21]。如表1所示,我们的方法取得了最低的平均误差。
3.4. 视觉比较
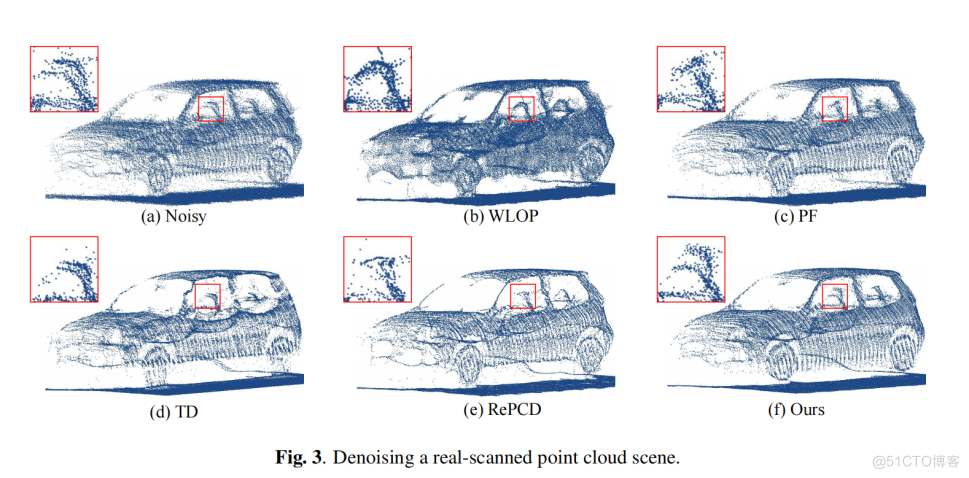
我们在被原始噪声破坏的原始扫描点云上评估GeoGCN。由于这些原始扫描点集的地面实况模型不可用,我们只展示了与其他方法的视觉比较,而不是与GT的比较。如图3所示,我们将我们的方法与WLOP[13]、Pointfilter[18]、TD[19]和RePCD[22]进行比较。从这些结果可以看出,我们的方法的头枕比其他方法好。在VNs和RNs的帮助下,我们的方法恢复了模型的局部细节,同时优化了全局形状。
3.5. 消融研究
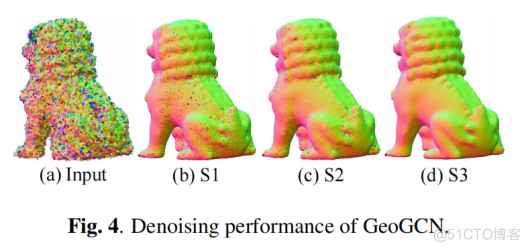
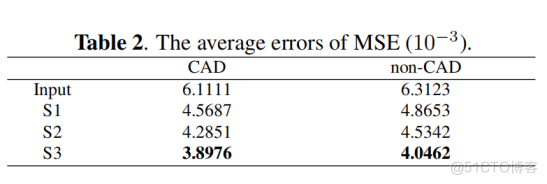
我们进行消融研究以验证VNs对全局形状保护的有效性和RNs对局部形状保护的有效性。GeoGCN被分解成三个部分:(1)S1:学习从噪声点云到初始去噪点的映射;(2)S2:添加虚拟法线损失;(3)S3。学习从初始RNs到精细RNs的映射,并使用精细RNs更新初始去噪点。
如表2和图4所示,S1的平均误差和可视化效果明显优于输入,说明第一个子网络S-GCN的初始去噪点是有效的。与S1相比,S2的平均误差较小,说服务器托管网明VNs可以通过保留全局几何信息来提高所提出的模型的性能。S3的平均误差和可视化效果最好,表明利用第二个子网络N-GCN回归的精细RN可以有效更新初始去噪点的顶点坐标并恢复局部细节。
4.结论
点云去噪是三维视觉和图形学中的一个基本问题,但没有得到很好的解决。在点云去噪方面,很少有人既能从训练数据中获益又能吸收几何领域的知识。我们建议将两种法线作为表面几何信号,一种是反映表面局部几何的真实法线,另一种是反映其全局几何的虚拟法线。这两种法线可以灵活地集成到当前的GCN架构中。我们认为,无噪声的点云比其噪声版本能更准确地估计其表面法线;更准确的表面法线比其原始表面法线能更好地消除噪声。因此,我们提出了一个级联的双流网络,首先在空间域对点坐标进行回归,然后在法线域对点法线进行回归,其中RNs和VNs被整合在一起。实验表明,我们的方法在噪声稳健性和全局及局部形状保护方面比其竞争对手有明显的改进。
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
产品经理是一个非技术型的岗位,但是懂一些技术相关的知识会更好的和技术部门沟通,能更好的从技术部门的角度理解需求的可行性。所以这么说来,技术转产品经理相对来说更加有优势。 任何事情不可能都是只有好处没有坏处的,同样的,技术转产品经理除了有优势当然也会存在劣势,今…
