
Fast角点检测
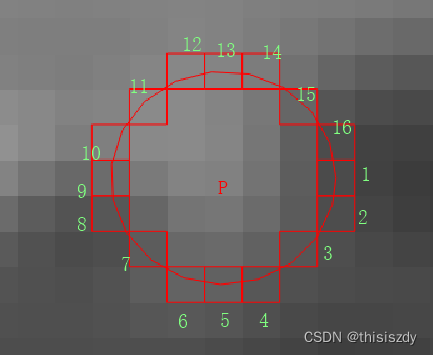
基本服务器托管网原理是使用圆周长为N个像素的圆来判定其圆心像素P是否为角点,如下图所示为圆周长为16个像素的圆(半径为3);OpenCV还提供圆周长为12和8个像素的圆来检测角点。
相对中心像素的位置信息
//圆周长为16
static const int offsets16[][2] =
{
{0, 3}, { 1, 3}, { 2, 2}, { 3, 1}, { 3, 0}, { 3, -1}, { 2, -2}, { 1, -3},
{0, -3}, {-1, -3}, {-2, -2}, {-3, -1}, {-3, 0}, {-3, 1}, {-2, 2}, {-1, 3}
};
//圆周长为12
static const int offsets12[][2] =
{
{0, 2}, { 1, 2}, { 2, 1}, { 2, 0}, { 2, -1}, { 1, -2},
{0, -2}, {-1, -2}, {-2, -1}, {-2, 0}, {-2, 1}, {-1, 2}
};
//圆周长为8
static const int offsets8[][2] =
{
{0, 1}, { 1, 1}, { 1, 0}, { 1, -1},
{0, -1}, {-1, -1}, {-1, 0}, {-1, 1}
};
角点判定条件
在圆周上顺时针从顺时针方向从1到N的顺序对圆周像素点进行连续编号。如果在圆周上有M个连续的像素的亮度都比圆心像素的亮度还要亮,或者比圆心像素的亮度还要暗,并且亮度差都大于设置的阈值t,则圆心像素被确定为角点。因此,成为角点必须满足下列两个条件之一。
- 条件1:集合S由圆周上M个连续的像素x组成,该集合的任意像素x都满足
I
x
>
I
p
+
t
I_x>I_p+t
Ix>Ip+t - 条件2:集合S由圆周上M个连续的像素x组成,该集合的任意像素x都满足
I
x
IxIp−t
在OpenCV中有三种模式,如下:
- TYPE_9_16,表示圆周上16个像素点/连续9个像素点满足条件
- TYPE_7_12,表示圆周上12个像素点/连续7个像素点满足条件
- TYPE_5_8,表示圆周上8个像素点/连续5个像素点满足条件
非角点检测
在一副图像中,非角点往往是占多数。而非角点检测比角点检测容易很多,因此首先剔除非角点将大大提高角点检测速度。例如,当圆周长N为16个像素,连续像素M为12,所以编号为1,5,9,13的这4个圆周像素点中应该至少有3个满足条件。在OpenCV中,采用了另一种方法来判断非角点,即同时检测任意直径上两个端点像素的像素值。
非极大值抑制
如果N一定,我们把使P仍然是角点的最大阈值
t
t
t定义为P的角点响应值,通过迭代,每次迭代比较8个连续的圆周像素与圆心像素之间的绝对差值,得到8个绝对差值中的最小值
d
d
d,与这8个连续像素两端相邻的两个圆周像素与圆心像素的绝对差值分别为
d
0
d_0
d0和
d
9
d_9
d9,则此次迭代所得到的角点响应值
v
i
v_i
vi为
v
i
=
m
a
x
(
t
,
m
i
n
(
d
,
d
0
)
,
m
i
n
(
d
,
d
9
)
)
v_i=max(t,min(d,d_0),min(d,d_9))
vi=max(t,min(d,d0),min(d,d9))
16个圆周像素需要迭代16次,则最终的角点响应值V为:
V
=
m
a
x
(
v
i
)
V=max(v_i)
V=max(vi)
角点响应
V
V
V得到后,需要在
3
∗
3
3*3
3∗3的邻域内比较
V
V
V,只保留那些比其8邻域都大的像素作为最终的角点。非角点的响应值定义为0。
Fast角点检测步骤
- 对被检测像素的16个圆周像素的部分像素点进行非角点检测;
- 如果初步判断为角点,则对圆周上的全部像素进行角点检测;
- 对角点进行非极大值抑制,最终得到角点;
OpenCV函数
void cv::FAST(InputArray image, std::vector& keypoints, int threshold, bool nonmaxSuppression = true)
void cv::FAST(InputArray image, std::vector& keypoints, int threshold, bool nonmaxSuppression, FastFeatureDetector::DetectorType type)
Parameters
image 输入图像,灰度图像;
keypoints 检测的关键角点;
threshold 中心像素与围绕该像素的圆形像素之间强度差的阈值;
nonmaxSuppression 如果为true, 则对检测到的角点(关键点)进行非极大值抑制;
type 三种选择:FastFeatureDetector::TYPE_9_16, FastFeatureDetector::TYPE_7_12, FastFeatureDetector::TYPE_5_8
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
概述 vue3 组合式API生命周期钩子函数有变化吗? Composition API 与 Options API 有什么区别? watch 和 watchEffect 的区别? vue2 如何升级到 vue3 ? vue3 组合式API生命周期钩子函数有变化…
