
测试视频请点击收看
利用声源定位板让舵机可以根据声源位置定位来控制舵板的方向.因为声源定位板本身已经给出了6个方位高电平的脚位.所以只需要我们在Arduino内调用舵机的程序库.然后各自赋予每个相应角度的各种的舵机角度值就可以做到.
声源定位板介绍:
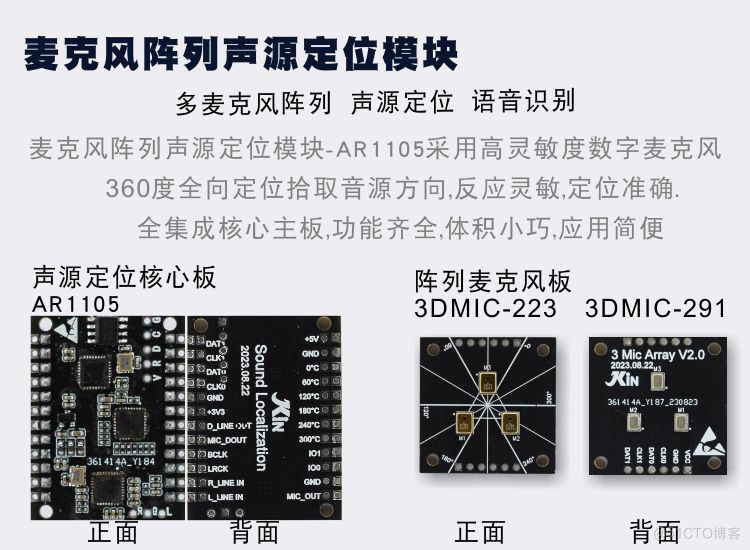
声源定位核心板上面集成了360度的方位引脚,采集到某个角度的声源,会在相服务器托管网应角度的脚位上输出一个高电平.我们只要把这个电平信号在Aduino上设置为输入脚.然后输入伺服马达转到相应的方向就可以实现.
麦克风阵列板采用的是3个数字麦克风的微型阵列.可以全向360度采集声源.定位的角服务器托管网度为6个方向.
因为这套声源定位板的尺寸比较小.所以可以应用在很多制作上面.
下一步准备用这套板子做个声源定位小车.有点像电子宠物狗一样.可以可以根据我们呼唤的声源定位到方向位置,回到我们的身边.
目前做的这个测试只是一个初步的DEMO,后期会慢慢更新的东西和功能.
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
mysql 连接数太多(SequelizeConnectionError: Too many connections) 这个就是最常见的问题了。因为我做的这个是前端监控系统,日志上报量比较大,所以经常会遇到连接数不够用的情况。 除了你要使用其他技术来缓解并发量…
