
机器视觉——角点检测
什么是角点检测
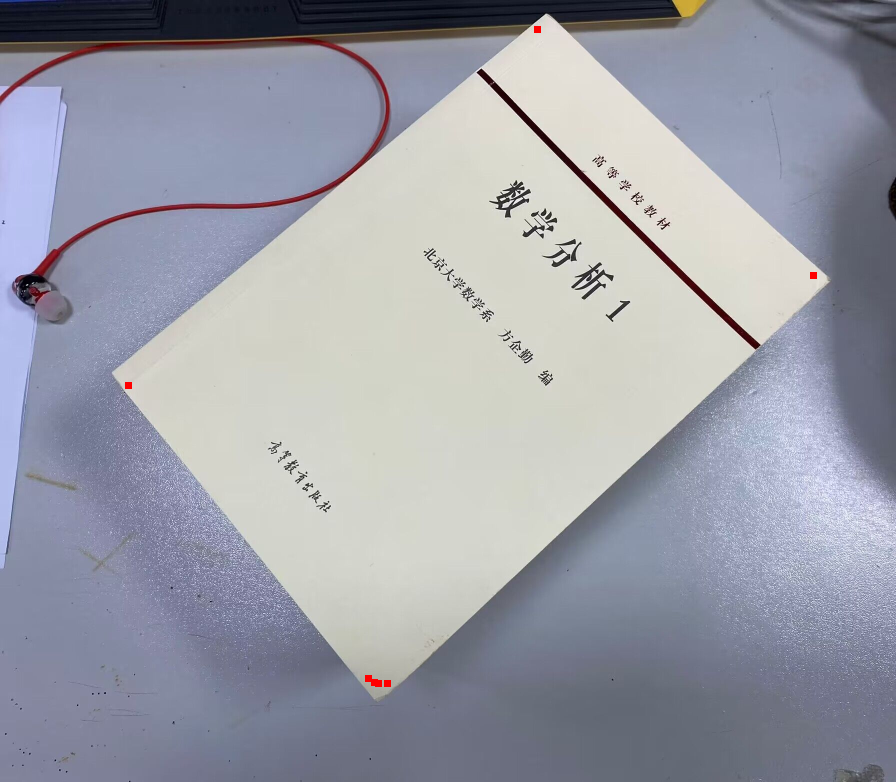
在几何学里,我们会看到各种各样的三角形、多边形等,它们都有一个显著的特征:包含了角点信息。比如在三角形里,我们有三个角;在矩形里,我们有四个角。我们将找到这些图像特征的过程称为特征提取 (Feature Extraction),我们之前所接触的Canny边缘检测也是特征提取的一种,其提取的是边缘特征,而我们这次所需要的是提取角点特征。现在,我们有一张图片需要去处理,要求:将图中书本的四个角点提取出来,以方便后续做透视变换等操作。这应该怎么样处理?

我们先对图像进行预处理操作
通过前面一系列知识的学习,我们可以将该RGB图片转换成灰度图像(本人比较懒,不想写代码,就用ps做处理了):
随后,我们对该图像进行二值化操作:
可以看到该图像周围还是有很多的噪声,于是我们对图像进行形态学操作+中值滤波:
这样,我们的图像预处理工作就完成了,接下来是提取角点信息。我们通常有两种方法:Harris角点检测与Shi-Tomasi角点检测
Harris角点检测
我们怎么样去提取一张图像里的角点信息呢?我们可以使用一个滑动窗口对图像进行操作,如下图所示:

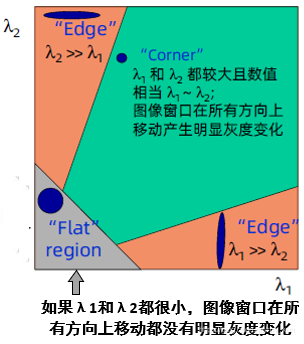
当窗口在图像上滑动时,我们可以根据窗口所在的区域分为如图的三种情况:
- 平坦区域:窗口内像素值几乎没有变化
- 边缘区域:沿平行于边缘的方向移动,像素值不会变化
- 角点区域:不管朝哪个方向移动,像素值都会发生变化‘
所以说,引起窗口内较大像素值变化的地方就是我们想要找寻的角点。那么我们该怎么样去找寻这些地方呢?
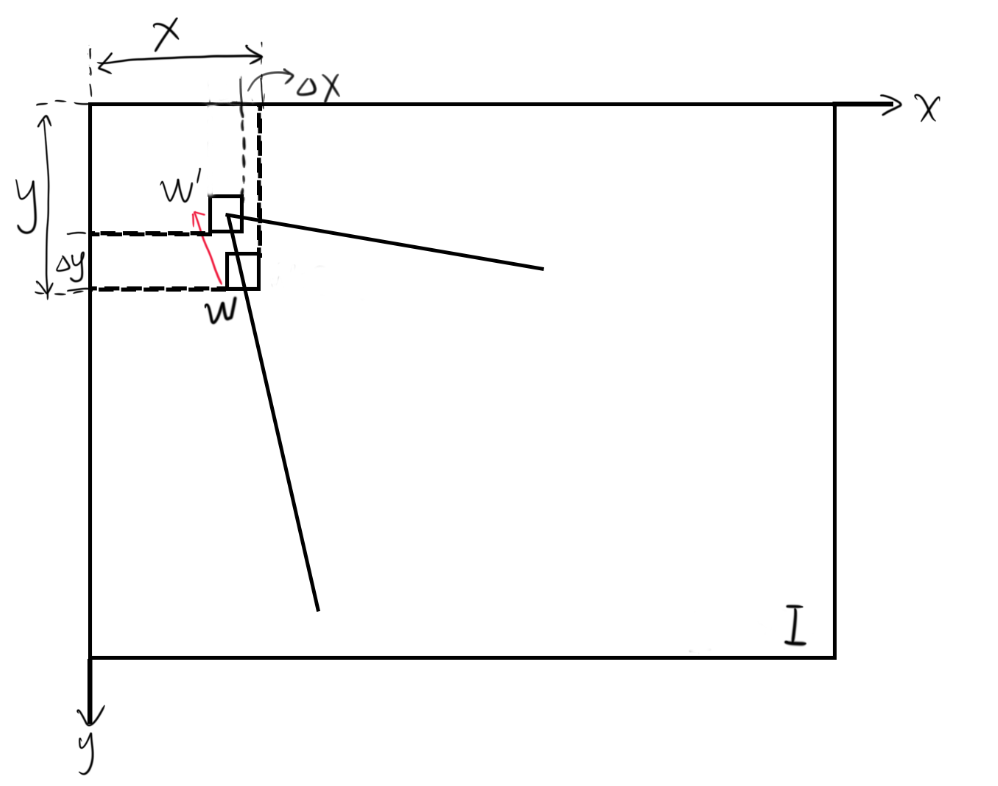
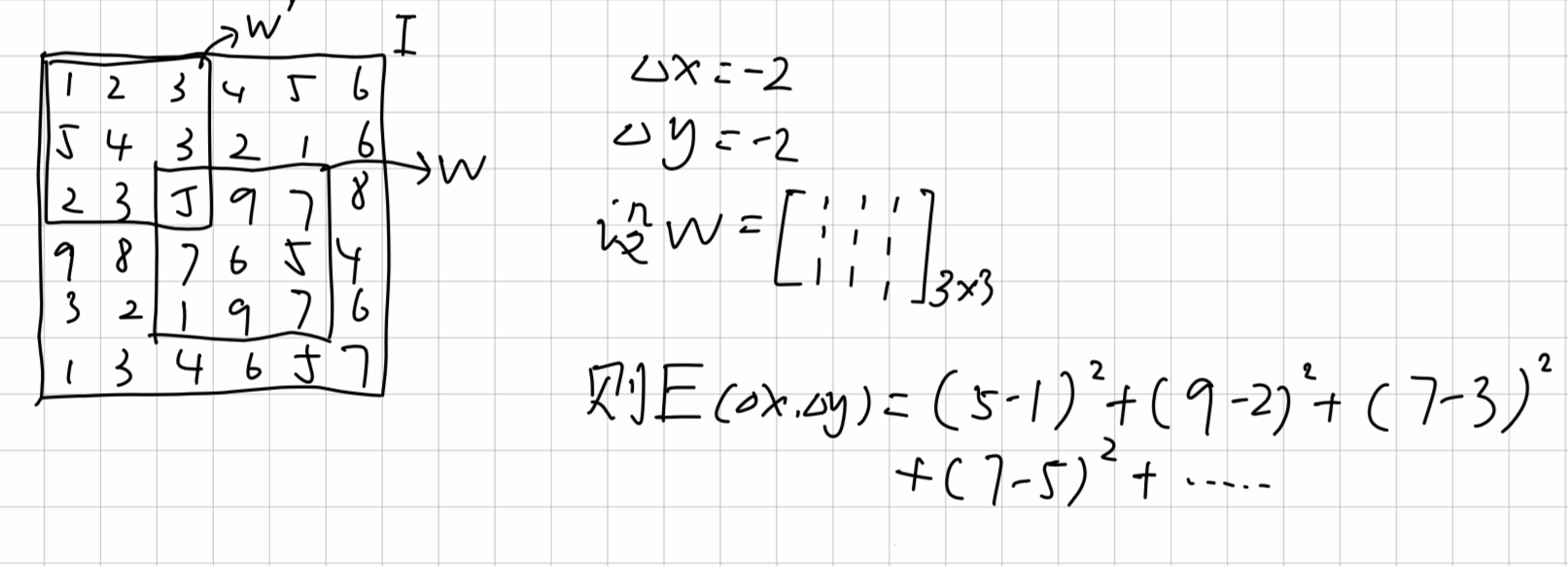
我们让一个窗口的中心位于灰度图像的一个位置((x,y)),这个位置的像素灰度值为(I(x,y)),如果这个窗口分别向x和y方向移动一个小的位移(Delta x)和(Delta y),到一个新的位置((x+Delta x, y+Delta y)),这个位置的像素灰度值就是(I(x+Delta x, y+Delta y)),那么我们所说的灰度变化值就是([I(x+Delta x, y+Delta y)-I(x,y)])。我们将上式做个平方处理,因为灰度的变化有正有负;然后再给每个像素乘上一个权值(w(x,y)),表示图像在((x,y))处像素点的权值,而这个(w(x,y))也就是我们说的窗口函数。最简单的,我们可以把窗口内的权重都设置为1,窗口大小一般设置为3×3以上(根据实际情况而定);有时我们也会将窗口内的像素权值设为一个高斯分布(二元正态分布)等(因为当窗口在角点位置移动时,中心点像素变化最大,所以将中心点的权值设为最大,周围逐渐下降,也就是一个高斯分布)。
这样,我们可以构造出一个函数,用来描述窗口在图像上移动时,窗口内像素灰度值的变化,该函数如下:
其中:
W为窗口,(x,y)subset W的意思也就是(x,y)可以取遍窗口内包含的所有像素 w(x,y)就相当于一个常量,后面对式子做变换时直接将其看成常数1即可
]
仅仅通过这个式子,我们还看不出来这个函数有什么性质,所以我们对该函数进行化简。
E(Delta x, Delta y)
&= sum_{(x,y)subset W}w(x,y)[I(x+Delta x,y+Delta y)-I(x,y)]^2
\
&= sum_{(x,y)subset W}w(x,y)[I(x,y)+Delta x I_x+Delta y I_y – I(x,y)]^2 (*)
\
&= sum_{(x,y)subset W}w(x,y)(Delta x^2 I_x^2 + Delta y^2 I_y^2 + 2Delta x Delta y I_x I_y)
\
&= sum_{(x,y)subset W}w(x,y)
begin{bmatrix}
Delta x
Delta y
end{bmatrix}
begin{bmatrix}
I_x^2 & I_x I_y
I_x I_y &I_y^2
end{bmatrix}
begin{bmatrix}
Delta x
Delta y
end{bmatrix} (**)
\
&= begin{bmatrix}
Delta x
Delta y
end{bmatrix}
{
sum_{(x,y)subset W}w(x,y)
begin{bmatrix}
I_x^2 & I_x I_y
I_x I_y &I_y^2
end{bmatrix}
}
begin{bmatrix}
Delta x
Delta y
end{bmatrix}
\
&= begin{bmatrix}
Delta x
Delta y
end{bmatrix}
begin{bmatrix}
sum_{(x,y)subset W}w(x,y) I_x^2 & sum_{(x,y)subset W}w(x,y) I_x I_y
sum_{(x,y)subset W}w(x,y) I_x I_y & sum_{(x,y)subset W}w(x,y) I_y^2
end{bmatrix}
begin{bmatrix}
Delta x
Delta y
end{bmatrix}
\
&= begin{bmatrix}
Delta x
Delta y
end{bmatrix}
{R^{-1}
begin{bmatrix}
lambda_1 & 0
0 & lambda_2
end{bmatrix}
R}
begin{bmatrix}
Delta x
Delta y
end{bmatrix} (其中,R是大小为2times 2的矩阵) (***)
end{aligned}
]
对于上面的过程,大家大概率看不太懂。别急,且听我一一道来
在 ((*)) 式中,我们将(Delta x和)(Delta y)看做极小量,对(I(x+Delta x,y+Delta y))使用了二元函数的全微分公式进行展开(其实就是对二元函数进行泰勒展开并省去高阶小量)(如果不是很明白全微分是什么东西,可以参考我的一篇博客:”https://www.cnblogs.com/Asaka-QianXiang/p/17172567.html”,自认为是讲的比较直观清楚的了)而对(I(x+Delta x,y+Delta y))进行如此操作的意图则是将变量(Delta x,Delta y)给分离出来,这样就能够方便我们对函数(E(Delta x, Delta y))进行分析,其实((**))式的意图也是如此。
在((**))式中,式子((Delta x^2 I_x^2 + Delta y^2 I_y^2 + 2Delta x Delta y I_x I_y))是以(Delta x,Delta y)为变量的二次型,于是我们写出该二次型的矩阵,也就是((**))式的东西。而我们这么处理的原因,就是对变量进行分离(用术语来说就是“解耦”)。我们的(Delta x, Delta y)是变量,而(I_x,I_y)都相当于常量,进行上述分解后,我们只需要研究矩阵:
sum_{(x,y)subset W}w(x,y) I_x^2 & sum_{(x,y)subset W}w(x,y) I_x I_y
sum_{(x,y)subset W}w(x,y) I_x I_y & sum_{(x,y)subset W}w(x,y) I_y^2
end{bmatrix}
]
为了方便书写,我们将该矩阵命名为(M)
在矩阵(M)里,(I_x,I_y)都是图像(I)在((x,y))处沿(x,y)轴的梯度(也就是(I)对(x,y)的偏导数,通俗点说就是斜率)。我们再仔细观察矩阵(M),可以发现它是一个实对称矩阵。我们对实对称矩阵(M)进行对角化处理(其实也是“解耦”,再具体点说,是将矩阵(M)变换到正交坐标系里),也就是((***))式。对矩阵(M)对角化处理后,我们得到(M)的两个特征值(lambda_1)和(lambda_2),这两个特征值的分别反映了图像在(x,y)方向的梯度信息。
是不是有点晕了,不要紧,我们能看懂最后的((***))式即可。当然,不要忘了我们最根本的目的:找到窗口像素变化很大的地方,也就是(Delta x,Delta y)稍微变一变,我的(E(Delta x,Delta y))就能产生剧烈变化。那么我们怎么将这个剧烈变化体现在我们的式子上呢?显然,就是我们的(Delta x, Delta y)的系数很大。在最终化简出来的((***))式中,(Delta x, Delta y)的系数是(R^{-1}
begin{bmatrix}
lambda_1 & 0
0 & lambda_2
end{bmatrix}
R)(令其为(A)),也就是除了(Delta x, Delta y)以外且与其内积的部分。学过线性代数中实对称矩阵对角化知识的同学都知道,我们的矩阵(R)里面包含的都是一堆正交的单位向量,也就是说,我们想知道系数(A)的大小,看矩阵(R)是没有用的,因为单位向量的模长是1,所以我们只能去分析矩阵(begin{bmatrix}
lambda_1 & 0
0 & lambda_2
end{bmatrix})。
我们刚刚也说了,(lambda_1)和(lambda_2)分别反映了图像在(x,y)方向的梯度信息。怎么去理解呢?我们可以考虑一个特殊情况:图像只包含垂直(x)轴或垂直(y)轴的边缘信息,也就是说,我们的(I_x),(I_y)中有一个为0(不妨令(I_y)为0),因此矩阵M里的元素就只剩(sum_{(x,y)subset W}w(x,y) I_x^2)了,其实也就是(lambda_1)。即(lambda_1)特征值反映了x轴方向的梯度信息,后同理即可。
这样,我们的(E(Delta x, Delta y))函数就分析的差不多了,那么我们该怎么去综合这些信息,进而在图像上进行评估并找出角点呢?
我们还是要回到(lambda_1)和(lambda_2)。我们知道它们反映了图像梯度信息,那么当图像分别包含平坦、边缘、角点信息时,我们的(lambda_1)和(lambda_2)是怎样的呢?
首先,考虑平坦信息。此时,不管从哪个方向看,梯度几乎都是0,因为非常平坦,所以此时,(lambda_1,lambda_2)都很小
其次,考虑边缘信息。由于我们的((***))式其实已经将图像所有方向的梯度信息给变换到了(lambda_1,lambda_2)组成的矩阵上,也就是一组沿(x,y)坐标轴的正交向量(有点难理解),所以我们只要考虑水平边缘或垂直边缘即可。水平边缘时,沿x的梯度变化很大,即(lambda_2)很小(接近0),(lambda_1)很大;垂直边缘时,同理,(lambda_1)很小(接近0),(lambda_2)很大。
最后,考虑角点信息。此时不管沿哪个方向,梯度变化都很大,所以我们的(lambda_1,lambda_2)都很大。
有了上面的规律还不够,我们还要将其反映到一个函数上,也就是需要构造一个函数(R(lambda_1,lambda_2)),当(lambda_1,lambda_2)处于不同状态(角点和非角点)时,函数(R)会有显著不同的取值。(注意,这里的(R)函数与上文的(R)矩阵只是符号相同,意义完全不同)
我们有以下函数:
]
其中,R称为角点相应函数,det表示矩阵的行列式(也就是特征值之积),trace表示矩阵的迹(也就是对角线元素之和,即特征值之和),k为一个经验常数,在范围((0.04, 0.06))之间
用(lambda_1,lambda_2)表示函数R,即:
]
很容易验证:
-
当(lambda_1,lambda_2)都很小(接近0),也就是平坦信息时,R也很小
-
当(lambda_1,lambda_2)有一个很大,另一个很小时(边缘信息),R会有一个不是很小的数(设为(t))
-
当(lambda_1,lambda_2)都很大且近似相等时(角点信息),R会有一个比(t)大的多的值
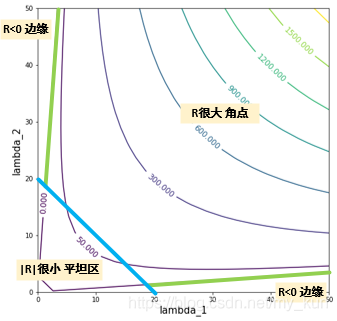
也就是说,我们只要设置一个阈值(threshold),然后将滑动窗口遍历整个图像,找到(R(lambda_1, lambda_2)>threshold)的位置((x,y)),那么这个((x,y))就是服务器托管网我们需要找的角点位置。
梳理一下,Harris角点检测的整个流程就是:
- 输入灰度图像(Img)
- 使用(Sobel)算子等梯度算子计算图像上每一个点((x,y))处的梯度(I_x, I_y)
- 对图像里的每一个像素点,构造矩阵(M),里面需要的参数有:窗口函数(w(x,y)),窗口里所有像素点的梯度信息(I_x,I_y)
- 求解角点响应函数(R),筛选函数值大于threshold的点作为角点
- 统计所有角点信息并输出
当然,OpenCV里有API函数供我们直接调用,因此我们只需要调用现有函数即可。
函数原型:
cv2.cornerHarris(src, dst, blockSize, ksize, k, borderType=BORDER_DEFAULT)
参数:
src: 输入的灰度图像
dst: Harris检测器输出的矩阵,大小等于输入图像,矩阵里每一个位置的值为角点响应函数R的值
blockSize: 角点检测中指定区域的大小(也就是W窗口的长或宽)
ksize: Sobel求梯度操作中Sobel算子的大小
k: 角点响应函数中的经验常数k
代码例程(python):
import cv2
import numpy as np
# 图像预处理
img = cv2.imread('Example4.png', flags=cv2.IMREAD_GRAYSCALE)
img_bgr = cv2.imread('Example.jpg')
img = cv2.resize(img, None, fx=0.5, fy=0.5)
img_bgr = cv2.resize(img_bgr, None, fx=0.5, fy=0.5)
kernel = np.ones((3,3), dtype=np.uint8)
img_open = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel, iterations=3)
img_close = cv2.morphologyEx(img_open, cv2.MORPH_CLOSE, kernel, iterations=10)
img_erode = cv2.morphologyEx(img_close, cv2.MORPH_ERODE, kernel, iterations=4)
img_blur = cv2.medianBlur(img_erode, 39)
cv2.imshow('blur', img_blur)
# Harris角点检测
harris_detector = cv2.cornerHarris(img_blur, 2, 3, 0.02) # Harris角点检测器
dst = cv2.dilate(harris_detector, kernel, iterations=3) # 为了使检测出来的角点更容易看见,所以膨胀
thresh = 0.011 * d服务器托管网st.max() # 设置阈值
img_bgr[dst > thresh] = [0, 0, 255] # 将角点标记为红色
cv2.imshow('dst', img_bgr)
cv2.waitKey(0)
cv2.destroyAllWindows()
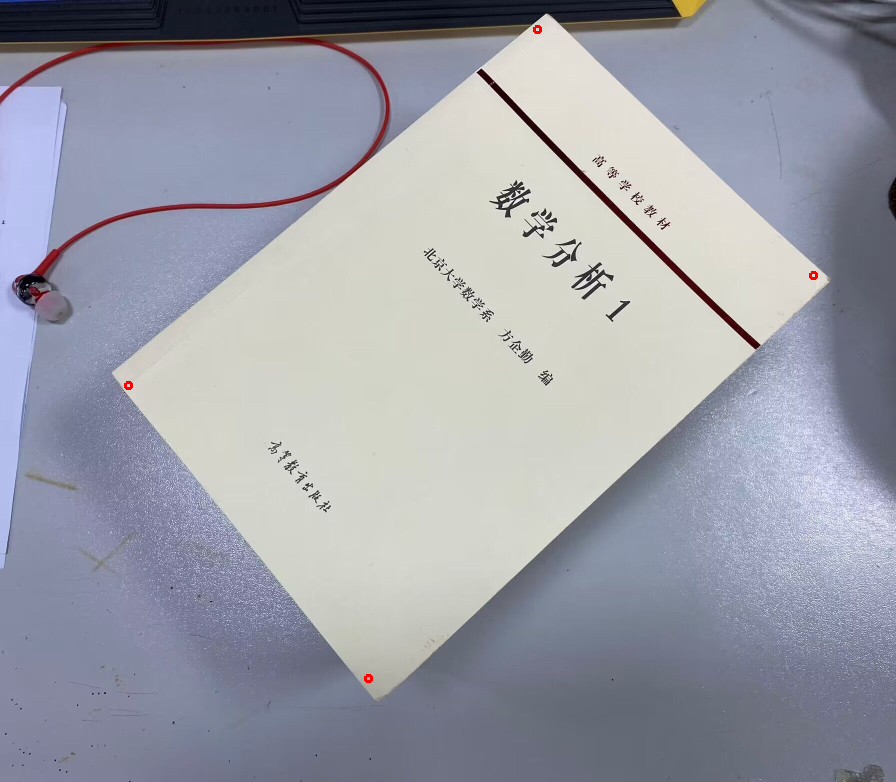
效果:
可以发现,下方我们检测出来了很多角点,而且距离都很近,这时候我们就可以考虑使用非极大值抑制(Non-Maximum Suppression)算法。
算法内容可以自己上网查阅相关资料,这里简述下我的代码流程:
- 建立一个列表pt,存储检测到的角点坐标、Harris检测器响应函数大小信息
- 对列表pt按照响应大小进行降序排列
- 定义一个函数,能够返回图像上两个点距离的平方
- 设置阈值,如果两点距离平方大于这个阈值,就将响应较小的点丢弃,筛选出响应较大的点进入列表selected_pt
完整代码如下:
import cv2
import numpy as np
# 图像预处理
img = cv2.imread('Example4.png', flags=cv2.IMREAD_GRAYSCALE)
img_bgr = cv2.imread('Example.jpg')
img = cv2.resize(img, None, fx=0.5, fy=0.5)
img_bgr = cv2.resize(img_bgr, None, fx=0.5, fy=0.5)
kernel = np.ones((3,3), dtype=np.uint8)
img_open = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel, iterations=3)
img_close = cv2.morphologyEx(img_open, cv2.MORPH_CLOSE, kernel, iterations=10)
img_erode = cv2.morphologyEx(img_close, cv2.MORPH_ERODE, kernel, iterations=4)
img_blur = cv2.medianBlur(img_erode, 39)
cv2.imshow('blur', img_blur)
# Harris角点检测
harris_detector = cv2.cornerHarris(img_blur, 2, 3, 0.02) # Harris角点检测器
thresh = 0.011 * harris_detector.max() # 设置阈值
# NMS非极大值抑制部分
pt = []
for h in range(harris_detector.shape[0]):
for w in range(harris_detector.shape[1]):
if harris_detector[h, w] > thresh:
pt.append([h, w, harris_detector[h,w]])
# 对pt中的元素按元素的第三个值降序排列
pt = sorted(pt, key=lambda x:x[2], reverse=True)
# 获取两点欧式距离的平方的函数
def getDist(pt1, pt2):
return (pt1[0] - pt2[0]) * (pt1[0] - pt2[0]) + (pt1[1] - pt2[1]) * (pt1[1] - pt2[1])
selected_pt = []
t = 500 # 阈值,两点距离小于该值的话就取角点响应最强的点
selected_pt.append(pt[0])
for p in pt[1:]:
if getDist(p, pt[0]) >= t:
selected_pt.append(p)
print(selected_pt)
# 绘图,显示角点
for p in selected_pt:
cv2.circle(img_bgr, (p[1], p[0]), 3, (0,0,255), 2)
cv2.imshow('dst', img_bgr)
cv2.waitKey(0)
cv2.destroyAllWindows()
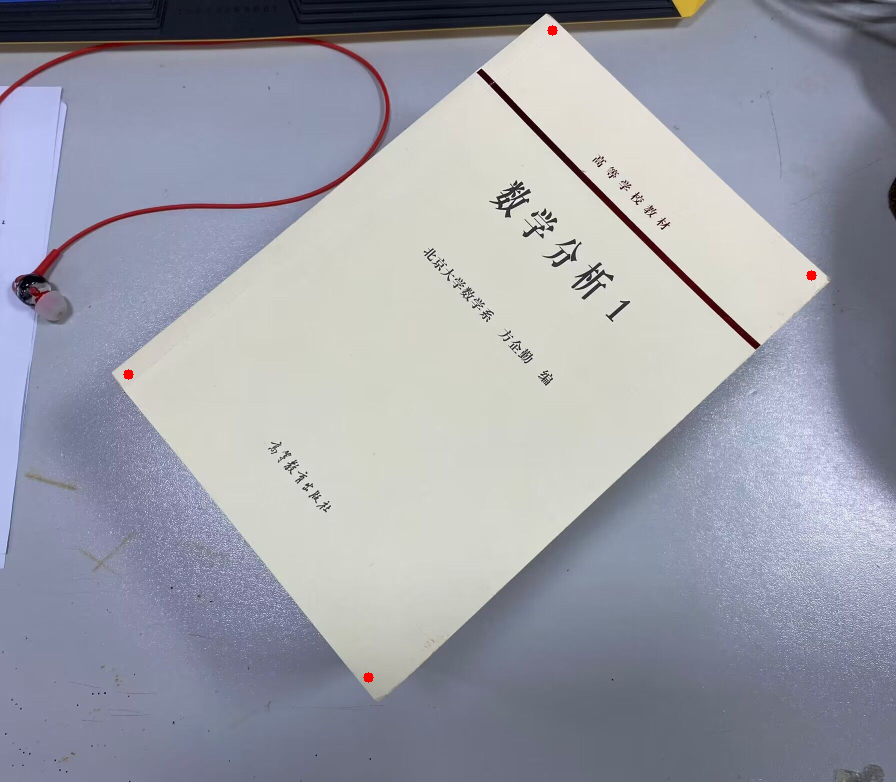
输出的角点位置略有偏差,大家可以通过修改代码自行优化
Shi-Tomasi角点检测
相比较于Harris角点检测,Shi-Tomasi检测器修改了Harris检测器中的角点响应函数R。
Shi-Tomasi 发现角点的稳定性其实和矩阵 M 的较小特征值有关,于是直接用较小的那个特征值作为分数。这样就不用调整k值了。如果矩阵M的两个特征值中较小的那一个大于设定的阈值,那么这个点是角点;如果两个特征值都小于阈值,那较小的特征值也必定小于阈值,那这个点就是平坦区域的点;如果其中一个特征值大于阈值而另外一个特征值小于阈值,那么这个点就是边缘点。所以我们只需要判断矩阵M的两个特征值中较小的那一个特征值是否是大于阈值,如果大于阈值这个点就是强角点。
即角点响应函数修改为:
]
OpenCV中,我们使用cv2.goodFeaturesToTrack()函数进行Shi-Tomasi角点检测。
函数原型如下:
corners = cv2.goodFeaturesToTrack(img,
maxCorners,
qualityLevel,
minDistance,
mask,
blockSize,
gradientSize,
useHarrisDetector=False,
k=0.04
)
参数:
corners: 输出的角点向量
img: 输入图像
maxCorners: 能输出的最大角点个数(若maxCorners应用实例:
import cv2
import numpy as np
# Shi-Tomasi角点检测部分
# 图像预处理
img = cv2.imread('Example4.png', flags=cv2.IMREAD_GRAYSCALE)
img_bgr = cv2.imread('Example.jpg')
img = cv2.resize(img, None, fx=0.5, fy=0.5)
img_bgr = cv2.resize(img_bgr, None, fx=0.5, fy=0.5)
kernel = np.ones((3,3), dtype=np.uint8)
img_open = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel, iterations=3)
img_close = cv2.morphologyEx(img_open, cv2.MORPH_CLOSE, kernel, iterations=10)
img_erode = cv2.morphologyEx(img_close, cv2.MORPH_ERODE, kernel, iterations=4)
img_blur = cv2.medianBlur(img_erode, 39)
cv2.imshow('blur', img_blur)
# shi-tomasi角点检测
corners = cv2.goodFeaturesToTrack(img_blur, 4, 0.01, 100, blockSize=10)
print(corners)
# 显示角点
for i in corners:
x,y = i.ravel()
cv2.circle(img_bgr,(int(x),int(y)),5,(0,0,255),-1)
cv2.imshow('dst', img_bgr)
cv2.waitKey(0)
cv2.destroyAllWindows()
输出图像:
使用说明
一般来说,我们使用cv2.goodFeaturesToTrack函数来进行角点检测(即Shi-Tomasi检测器)。在OpenCV官方教程中,该函数说明如下:
(https://docs.opencv.org/4.1.0/dd/d1a/group__imgproc__feature.html#ga1d6bb77486c8f92d79c8793ad995d541)
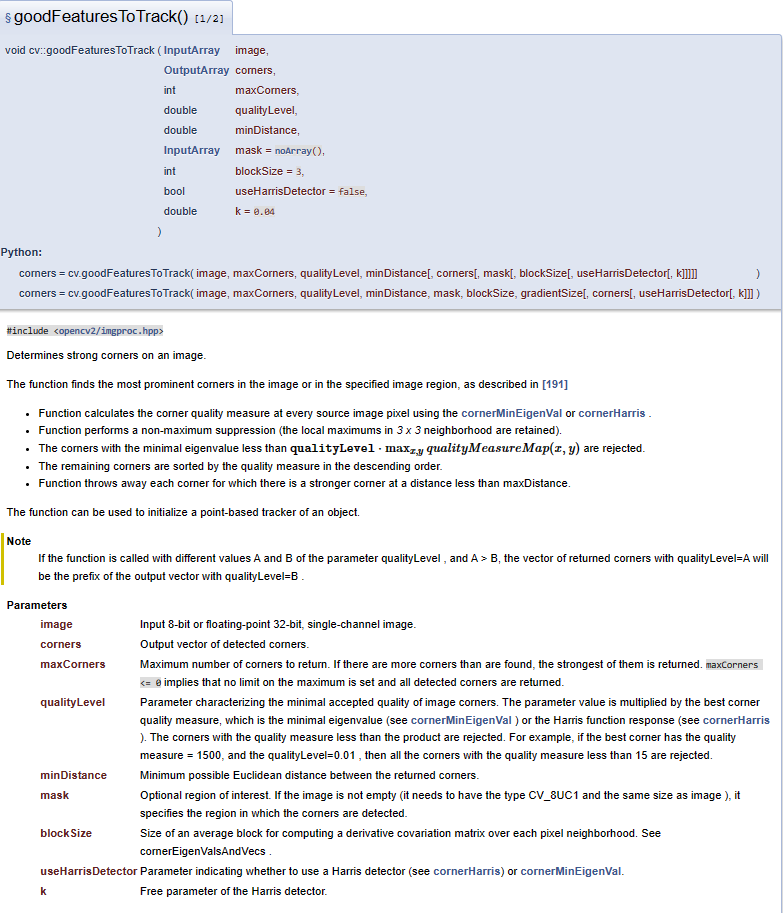
我也仅仅说明一下需要注意的几个参数:
- 返回值corners是一个numpy数组。比如说,在上文的例子中,我们将corners 给打印出来:
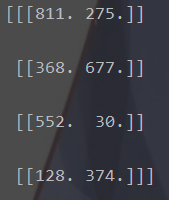
想要处理这个corners数组,我们可以对里面的元素进行遍历,比如:
for i in corners:
...
但请注意,我们的i此时还是一个形如 [[811. 275.]] 的嵌套数组。想要将里面的数字提取出来,我们可以使用python内置的ravel方法:
for i in corners:
x,y = i.ravel()
这样,我们就将检测器提取出的角点坐标转移到x,y变量中了,后续处理也方便不少。
- qualityLevel:调节该参数能够让我们控制角点数量:
我们的角点响应函数(R=min(lambda_1,lambda_2)),而且我们输入图像的每一个像素点都对应着一个响应函数R的值。假如说,我们的图像有一个像素点,其响应函数R的值最大(设为(m)),qualityLevel设为(0.01),那么在整个图像中,只要一个像素点对应函数R的值大于(0.01*m),那么这个点就会被认为是角点。
- blockSize:就是我们在角点检测原理一节中提及的滑动窗口W的长或宽。
调参Trick
一般来说,按以下要点调参即可:
- 想要多少角点,就将maxCorner设多大(建议一开始设大一些,然后逐渐缩小)
- qualityLevel一般0.01左右,qualityLevel的作用相当于阈值
- 检测出的角点密集就试试增大minDistance
- 需要提取的角点比较平滑(接近弧状),blockSize就给大些(如10),角点比较尖锐,blockSize就给小点(如3)
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
第七章 前端工程化_2 六、Vue3视图渲染技术 6.1 模版语法 6.1.1 插值表达式和文本渲染 6.1.2 Attribute属性渲染 6.1.3 事件的绑定 6.2 响应式基础 6.2.1 响应式需求案例 6.2.2 响应式实现关键字ref 6.2.3…
