
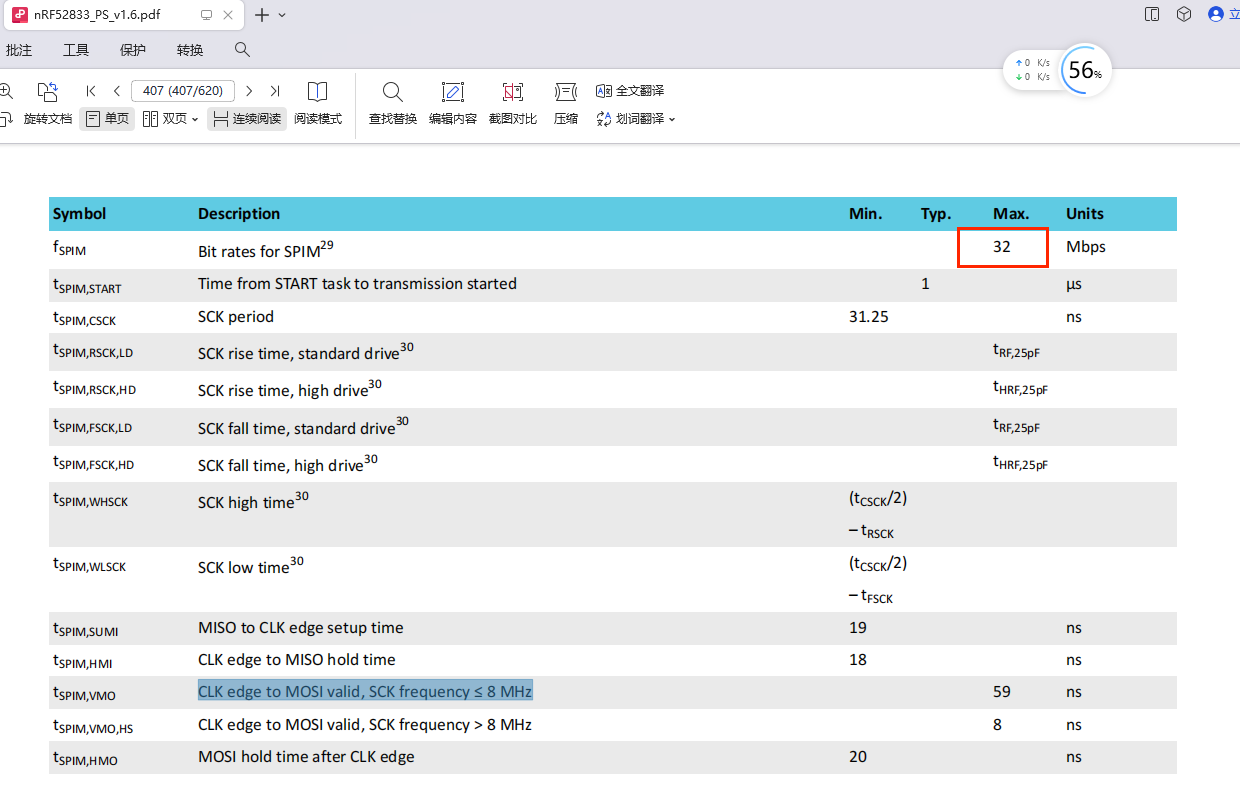
简介:在nordic的nrf52系列中的nrf52833和nrf52840的SPIM3都是支持最大32M的spi速率,其余的只有8M,当在需要刷屏,或者一些需要高速32M-SPI时,这是一个很好的使用方式,下面我就结合GPIOTE+PPI+SPIM3实现无CPU参与的32M-SPI数据发送:
测试环境:软件:SDK_17.1,在ble_app_uart例子中添加
硬件:nrf52832-DK板
一、引脚选择
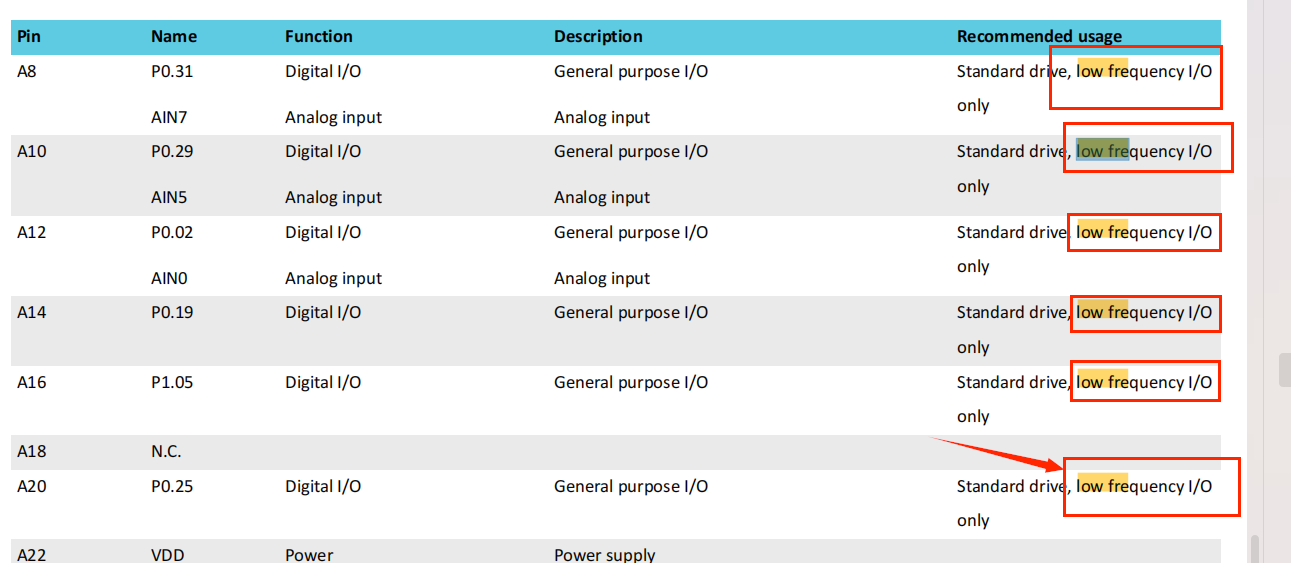
特别注意一点,需要使用32M的SPI时,一定要选择非低频的引脚作为SPI的pin脚,如下面这些引脚就不可以:
在数据手册中还有这样一条提示,他的意思是在使用32M的时候,可能还要配置为高驱模式,不然可能有数据错乱。

根据数据手册我当前选择4,5,27,26这4个引脚作为SPI的引脚。
二、代码编写
1.源文件添加
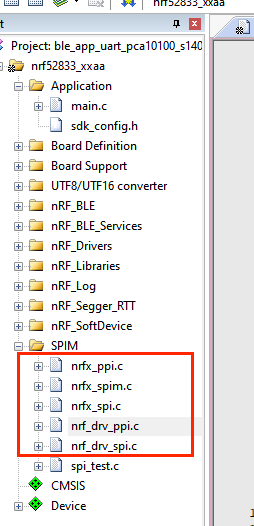
在工程中加入如下几个.c源文件,其中spi_test.c不是官方库文件,是我的SPIM配置代码,这一点注意,你只用添加前面的5个源文件就行
2、宏定义启用
这一步主要是启用相关的源文件,如果宏定义不启用刚刚添加的部分源文件是无法添加的,这一步很重要:
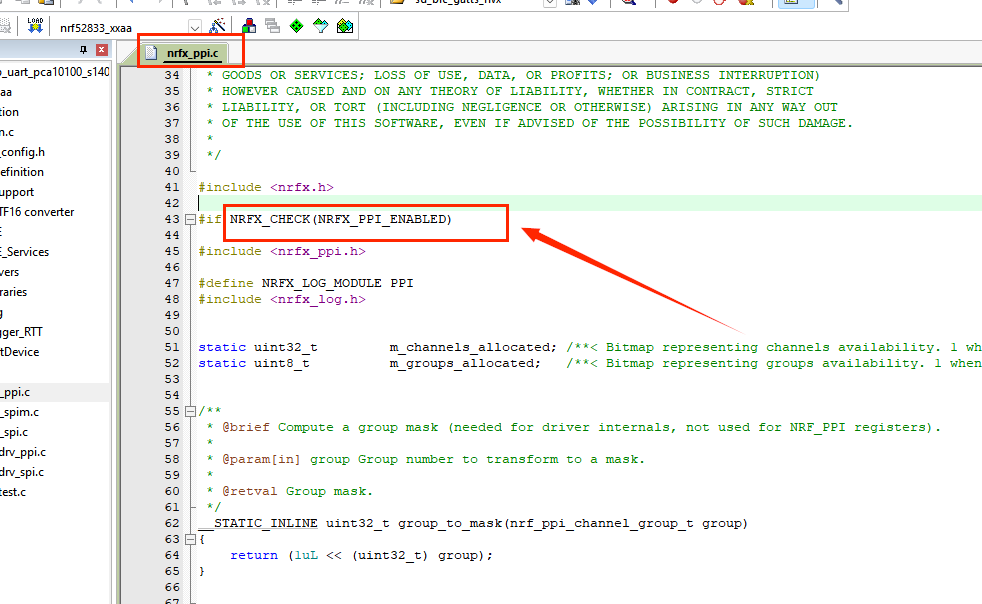
第一步启用SPIM3:
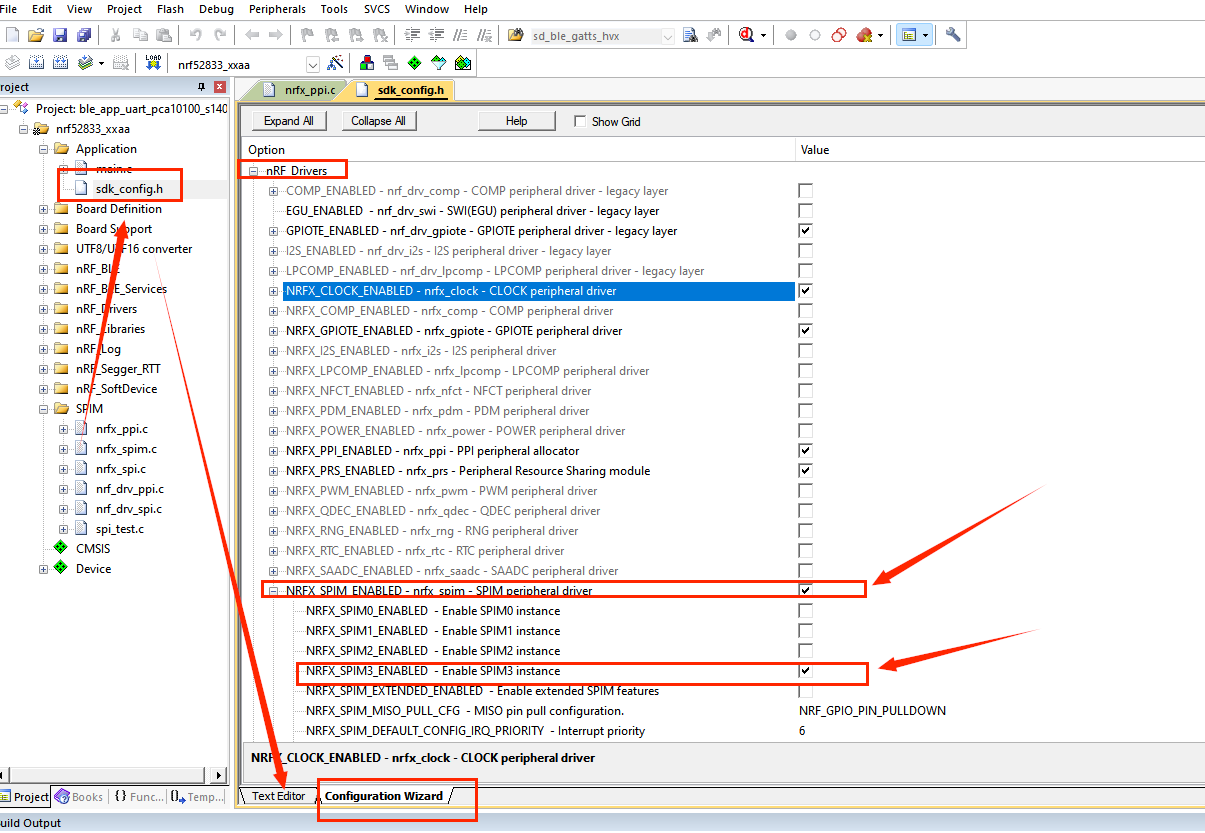
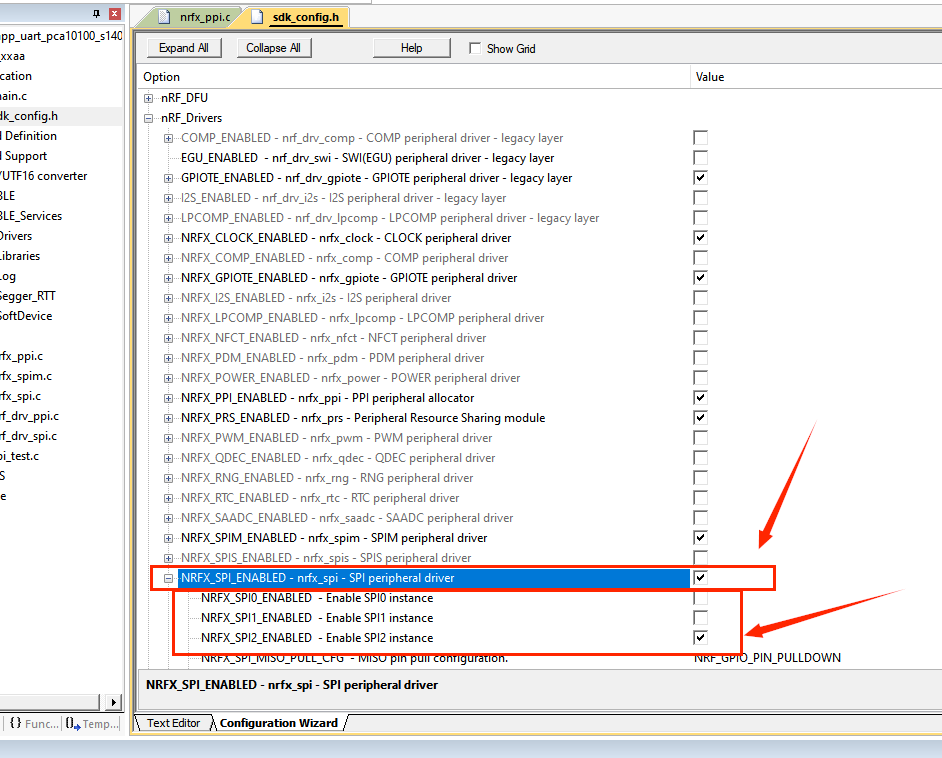
还要勾选另一个宏定义,在调试过程中发现如果只启动NRFX_SPI_ENABLED,不任意使能它下面的NRFX_SPI0_ENABLED,NRFX_SPI1_ENABLED,NRFX_SPI2_ENABLED的其中一个,居然无法让NRFX_SPIM_ENABLED生效,这一点需要注意一下。
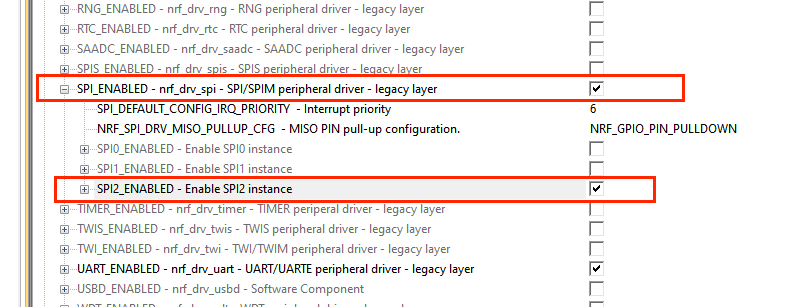
经过以上的宏定义勾选,SPI的驱动就启动完成了。
第二步启用PPI:
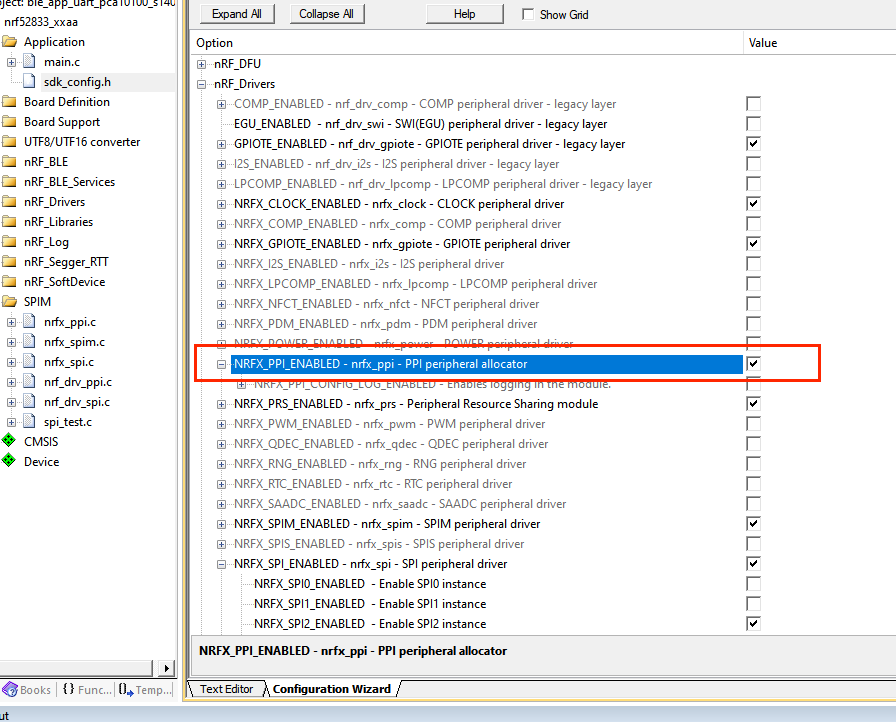
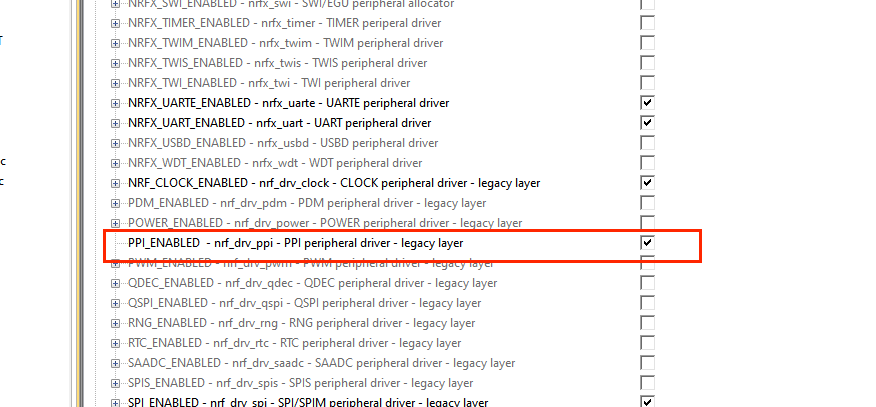
到这一步宏定义就都启用完成了,你可以检测一下加入的源文件是否都启用了。
然后就是代码部分,我已经进行了相关注释,可以直接copy使用。
三、代码
1、.c文件
#include "nrf_drv_spi.h" #include "app_util_platform.h" #include "nrf_drv_gpiote.h" #include "nrf_delay.h" #include "boards.h" #include "app_error.h" #include string.h> /*log打印的头文件*/ #include "nrf_log.h" #include "nrf_log_ctrl.h" #include "nrf_log_default_backends.h" #include "nrf_drv_ppi.h" #include "spi_test.h"
/*触发中断的按键,由于我使用的是DK板,所以直接使用按键4,如果你测试的是自己的板子,可以自己定义pin脚
#define PIN_IN BUTTON_4 #define leng 10 #define TEST_STRING "spi_ppi_test" /*测试buffer设置*/ uint8_t TX_buffer[]=TEST_STRING; uint8_t RX_buffer[leng]; /*PPI 通道实例变量定义*/ static nrf_ppi_channel_t m_ppi_channel; /*SPIM3可以达到32M*/ static nrfx_spim_t my_spi=NRFX_SPIM_INSTANCE(3); /*变量定义,用于确定SPI是否正确传输,每一次都会进行加一,0x31只是一个本次随意设置的初始值*/ uint8_t test=0x31; /*同时设置TX和RX的buffer*/ nrfx_spim_xfer_desc_t m_buffer = NRFX_SPIM_XFER_TRX(TX_buffer,sizeof(TX_buffer),RX_buffer,leng); /** * @brief SPI user event handler. * @param event */ void spi_event_handler(nrfx_spim_evt_t const * p_event, void * p_context) { ret_code_t err_code; /*传输事件判断*/ if(NRF_DRV_SPI_EVENT_DONE == p_event->type) { NRF_LOG_INFO("Transfer completed.") TX_buffer[0]=++test; /*一次传输完成,提供下一次传输的buffer,如果有大量接收的数据,可以使用两个buffer交替接收,便于流出时间进行数据处理,第二个buffer也是使用 nrfx_spim_xfer_desc_t m_buffer = NRFX_SPIM_XFER_TRX(TX_buffer2,sizeof(TX_buffer2),RX_buffer2,leng2);进行定义,如果是只想单独定义一个TX和RX 请使用 NRFX_SPIM_XFER_TX 或者 NRFX_SPIM_XFER_RX */ err_code = nrfx_spim_xfer(&my_spi,&m_buffer,NRF_DRV_SPI_FLAG_HOLD_XFER); APP_ERROR_CHECK(err_code); } /*如果有接收数据就打印一下,实际应用中可以是其余处理*/ if (RX_buffer[0] != 0) { NRF_LOG_INFO(" Received:"); NRF_LOG_HEXDUMP_INFO(RX_buffer, strlen((const char *)RX_buffer)); } } void gpiote_init(void) { ret_code_t err_code; /*由于这个例子是基于ble_app_uart,在 主函数中的buttons_leds_init(&erase_bonds);中已经初始化了GPIOTE,所以注释掉,不能重复初始化*/ // err_code = nrf_drv_gpiote_init(); // APP_ERROR_CHECK(err_code); nrf_drv_gpiote_in_config_t in_config = NRFX_GPIOTE_CONFIG_IN_SENSE_HITOLO(true); in_config.pull = NRF_GPIO_PIN_PULLUP; /*由于这个例子是基于ble_app_uart,在 主函数中的buttons_leds_init(&erase_bonds);中已经初始化了DK板上的按键4,我要用来做SPI数据触发,所以先解绑这个引脚在配置 */ nrf_drv_gpiote_in_uninit(PIN_IN); /* 中断初始化,回调为NULL,因为是通过PPI触发SPIM所以不需要回调,当然如果有需要你也可以设置 */ err_code = nrf_drv_gpiote_in_init(PIN_IN, &in_config, NULL); APP_ERROR_CHECK(err_code); /* GPIO中断事件使能 */ nrf_drv_gpiote_in_event_enable(PIN_IN, true); } void spim_init(void) { /*不能使用低频引脚,还要配置为高驱*/ 服务器托管网nrfx_spim_config_t spi_config = NRFX_SPIM_DEFAULT_CONFIG; spi_config.ss_pin = 27; spi_config.miso_pin = 4;//如果是刷屏可以不使用MISO数据pin脚,可以设置为 NRFX_SPIM_PIN_NOT_USED spi_config.mosi_pin = 5; spi_config.sck_pin = 26; spi_config.frequency=NRF_SPIM_FREQ_32M; APP_ERROR_CHECK(nrfx_spim_init(&my_spi, &spi_config, spi_event_handler, NULL)); /*高驱配置*/ nrf_gpio_cfg(27, NRF_GPIO_PIN_DIR_OUTPUT, NRF_GPIO_PIN_INPUT_DISCONNECT, NRF_GPIO_PIN_NOPULL, NRF_GPIO_PIN_H0H1, NRF_GPIO_PIN_NOSENSE); nrf_gpio_cfg(4, NRF_GPIO_PIN_DIR_INPUT, NRF_GPIO_PIN_INPUT_CONNECT, NRFX_SPIM_MISO_PULL_CFG, NRF_GPIO_PIN_H0H1, NRF_GPIO_PIN_NOSENSE); nrf_gpio_cfg(5, NRF_GPIO_PIN_DIR_OUTPUT, NRF_GPIO_PIN_INPUT_DISCONNECT, NRF_GPIO_PIN_NOPULL, NRF_GPIO_PIN_H0H1, NRF_GPIO_PIN_NOSENSE); nrf_gpio_cfg(26, NRF_GPIO_PIN_DIR_OUTPUT, NRF_GPIO_PIN_INPUT_DISCONNECT, NRF_GPIO_PIN_NOPULL, NRF_GPIO_PIN_H0H1, NRF_GPIO_PIN_NOSENSE); NRF_LOG_INFO("SPI init end."); } void ppi_init(void) { ret_code_t err_code; err_code = nrf_drv_ppi_init(); APP_ERROR_CHECK(err_code); /*给spi初始化缓存,并flag选择什么时候启动传输*/ /*NRF_DRV_SPI_FLAG_HOLD_XFER ---- 占时不启用,可在PPI触发下的SPIM的传输*/ err_code = nrfx_spim_xfer(&my_spi,&m_buffer,NRF_DRV_SPI_FLAG_HOLD_XFER); APP_ERROR_CHECK(err_code); /* 触发的事件地址*/ uint32_t gpio_event_addr = nrfx_gpiote_in_event_addr_get(PIN_IN); /* 执行的任务地址 */ uint32_t spim_tick_addr = nrfx_spim_start_task_get(&my_spi); /*PPI设置*/ //把PPI的通道1分配出来 err_code = nrf_drv_ppi_channel_alloc(&m_ppi_channel); APP_ERROR_CHECK(err_code); /* 关联事件和任务*/ err_code = nrf_drv_ppi_channel_assign(m_ppi_channel, gpio_event_addr, spim_tick_addr); APP_ERROR_CHECK(err_code); /* 启动PPI*/ err_code = nrf_drv_ppi_channel_enable(m_ppi_channel); APP_ERROR_CHECK(err_code); } void SPIM_tes服务器托管网t_init(void) { spim_init(); gpiote_init(); ppi_init(); }
2、.h文件
#ifndef SPI_TEST_H__ #define SPI_TEST_H__ void SPIM_test_init(void); #endif
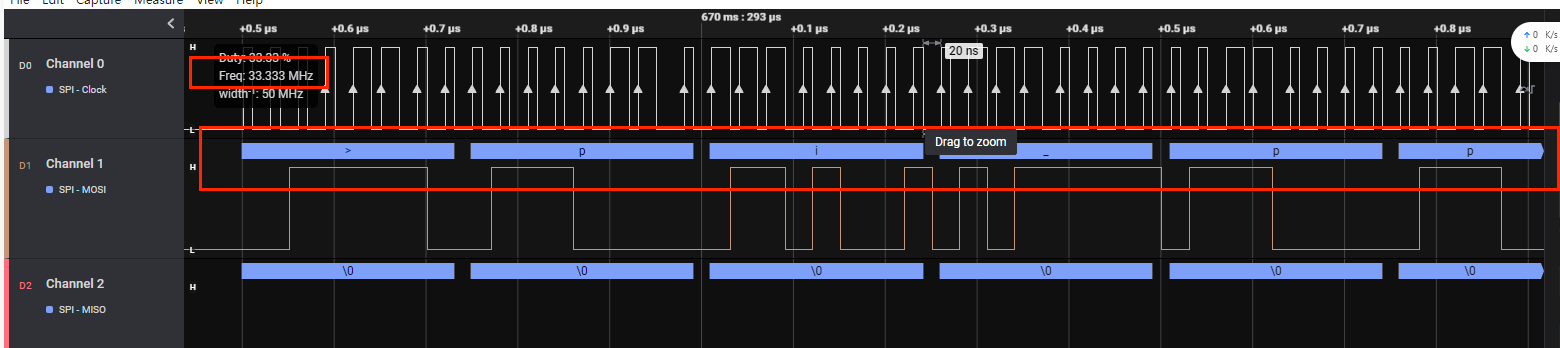
只要在主函数中引用SPIM_test_init();就可以了。如下是我的逻辑分析仪的采样波形,由于我使用的逻辑分析仪器最大只有100M采样速率,感觉有点不准确,导致有些偏差,还有就是我使用的是杜邦线连接,32M速率下也可能有影响,测试如果是使用杜邦线,尽量短一点,逻辑分析仪采样率尽量高。
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
相关推荐: 深度学习应用篇-计算机视觉-视频分类[8]:时间偏移模块(TSM)、TimeSformer无卷积视频分类方法、注意力机制
深度学习应用篇-计算机视觉-视频分类[8]:时间偏移模块(TSM)、TimeSformer无卷积视频分类方法、注意力机制 1.时间偏移模块(TSM) 视频流的爆炸性增长为以高精度和低成本执行视频理解任务带来了挑战。传统的2D CNN计算成本低,但无法捕捉视频特…
