
- ICLR 2020,6 6 6。
- 材料:
- 论文题目:Keep Doing What Worked: Behavior Modelling Priors for Offline Reinforcement Learning
- 项目网站:https://sites.google.com/view/behavior-modelling-priors
- pdf 版本:https://arxiv.org/pdf/2002.08396.pdf
- html 版本:https://ar5iv.labs.arxiv.org/html/2002.08396
- open review:https://openreview.net/forum?id=rke7geHtwH
- 总结:
- 是 2020 年的 offline RL 算法。
- 一些 offline RL 编年史: BCQ 2019 ICLR,CQL 2020 NeurIPS,Advantage-Weighted Regression(AWR) 2020 2021 ICLR 连续被拒,TD3+BC 2021 NeurIPS,IQL 2022 ICLR,Pessimistic Bootstrapping(PBRL) 2022 ICLR。(链接是本站博客)
- 算法框架:Policy Iteration,即先搞出一个 policy,再算 policy 的 Q function,再 a = argmax Q(s,a) 搞出新 policy,再算 policy 的 Q function,…
- ① 在 policy evaluation 时,使用 offline dataset 里的 transition 来更新。
- ② 在 policy improvement 时,maximize Q(s, (pi)(s)) ,同时约束 (pi) 与一个 prior policy 的 KL 散度,这是为了不要与 in-distribution 的 state-action 离太远,离得越远,Q 的 over-estimate 越严重。
- 核心 idea 是 prior policy 如何得到。在先前的 BCQ 和 BEAR-QL 中,直接去学 offline dataset 的总的 policy,maximize _{offline dataset} log(a|s)。
- 这篇文章的核心 trick 叫做 ABM(Advantage-weighted Behavior Model)。
- 在从 offline dataset 里提取 policy 的过程中,对 log(a|s) 进行一个基于 advantage 的加权。对 (s0, a0) 的 advantage = Q – V = Return(s0,a0,s1,…,sn,V(sn)) – V(s0) 。
- 若 advantage ≥ 0,则 加权 = 1,否则加权 = 0。即,只在具有正 advantage 的环境转变的“好”数据上拟合模型。(这个加权函数还尝试了 exp 之类,但效果差异不大)。
- 是 2020 年的 offline RL 算法。
- 思考:
- advantage weighted 的思想,感觉好像 performance 非常好…
- offline RL 有两种主要思想,一种是 Q update 时拉低 OOD 的 Q value(CQL PBRL),或在 policy update 添加不要离 behavior policy 太远的正则项(TD3+BC),另一种是对 offline dataset 的 policy 进行 advantage-weighted(AWR)。IQL 是一股清流,用 (s,a,r,s’,a’) 来做 Q update。
0 abstract
- background:
- off-policy RL 适用于只有固定数据集(batch)且无法获得新 experience 的 setting,对机器人控制等现实世界的问题很有吸引力。然而在实践中,标准的 off-policy RL 在 continuous control 的 batch 设置中失败。
- method:
- 在本文中,我们提出了简单解决方案:承认使用任意 behavior policy 生成的数据,并使用学习的先验(优势加权行为模型 (ABM))将 RL 策略偏向于先前已执行并可能在新任务上取得成功的操作。我们的方法可以看作是最近 batch RL(offline RL)工作的扩展,可以从冲突的数据源中稳定地学习。
- results:
- 在各种 RL 任务中,performance 比起强 baseline 都有所改进,包括在标准的 continuous control benchmark 以及 simulation 和真机的 multi-task learning。
1 intro
- Stay close to the relevant data:① 学习一个先验,哪些候选策略可能得到数据支持(同时确保先验 focus on 相关轨迹),② 进行 policy improvement,stay close to the learned prior policy。
- 提出了一种 policy iteration 算法,服务器托管网学习先验,建立 behavior data 的优势加权模型,使 RL 策略偏向于以前经历过的、并且在当前任务中也很可能成功的 action。
- 我们还发现,利用适当的先验足以稳定学习;证明当使用 policy iteration 算法时, policy evaluation 步骤是 implicitly stabilized 的 —— 只要忠实评估 TD-error 式 update 的值函数。这导致了比以前的工作更简单的算法(Fujimoto 等人,2018;Kumar 等人,2019 年)。
- advantage-weighted behavior model(ABM)。
3 method
A learned prior for offline off-policy RL from imperfect data – 从不完美数据中学习 offline RL 的先验。
使用策略迭代(policy iteration)框架,在 policy improvement 步骤中有约束(参见 appendix A 的 Algorithm 1)。
- 首先,从迭代 i 中的给定策略 (pi_i) 开始,去找一个近似的 action-value 函数 (Q^{pi_i}(s,a)) 。
- 然后,使用 (hat Q^{pi_i}) 来优化 (pi_{i+1}) ,同时约束 确保接近 empirical state-action distribution。
notation:D_ 是 offline dataset, 是 policy 的参数, 是 Q function 的参数。
3.1 Policy Evaluation
- 同时学 value funct服务器托管网ion 和 Q function。
- (argmin big[ r(s_t,a_t) + hat V(s_{t+1})-hat Q_{new}(s_t,a_t)big]^2) ,其中 V hat 为前一个 Q hat (s, (pi)(s)) 。(公式 1)
3.2 Prior Learning and Policy Improvement
- 把 policy learning 当作约束优化问题:maximize Q hat(s, (pi)(s)),同时约束 policy 与 prior policy 的 KL 散度<。(公式 2)
- 考虑两种算法来得到 prior policy:
- 类似于 BCQ 和 BEAR-QL 的方法:直接 argmax log(a | s) ,这里面的 s a 来自于 offline dataset。(公式 3)
- weighted advantage 方法:argmax log(a | s) f(Return – V hat) 。(公式 4)
- Return 用 (^{N-i} r(s,a) + ^{N-t}hat V) 来算,f 是一个递增的非负函数。
- 这里采用 f(x) = 1 if x≥0 else 0。还尝试了 f(x) = exp x 之类,但实验结果差不多。
- 只在“好”数据上拟合模型(即具有正 advantage 的环境转变, 其中 advantage 是使用当前策略估计的)
- (如果 offline dataset 质量足够高,可以直接在 dataset 里学 (pi_{abm}) 和 Q abm ,作为输出策略:用 (pi_{abm}) 计算 advantage,然后用 advantage-weight 计算新的 Q abm)
- 如何优化公式 2 | EM-style optimization:(两步方法)
- 首先,公式 2 的 (argmaxpi) 最优解可以写为, (hat pi(a|s)propto pi_{prior}(a|s)exp(hat Q^{pi_i}big(s,abig)/eta)) ,其中 可用凸优化确定。没有听懂,非常神秘……
- 然后,去用 (pi_{prior}) 来查询 (hat Q^{pi_i}) 的值,等价于 maximize 一个 weighted log likelihood,用梯度下降 + 约束 KL 散度(trust-region constraint)来实现。(没懂)
- 如何优化公式 2 | Stochastic value gradient optimization:
- 把 KL 散度的约束用 Lagrange 松弛塞到目标函数里。
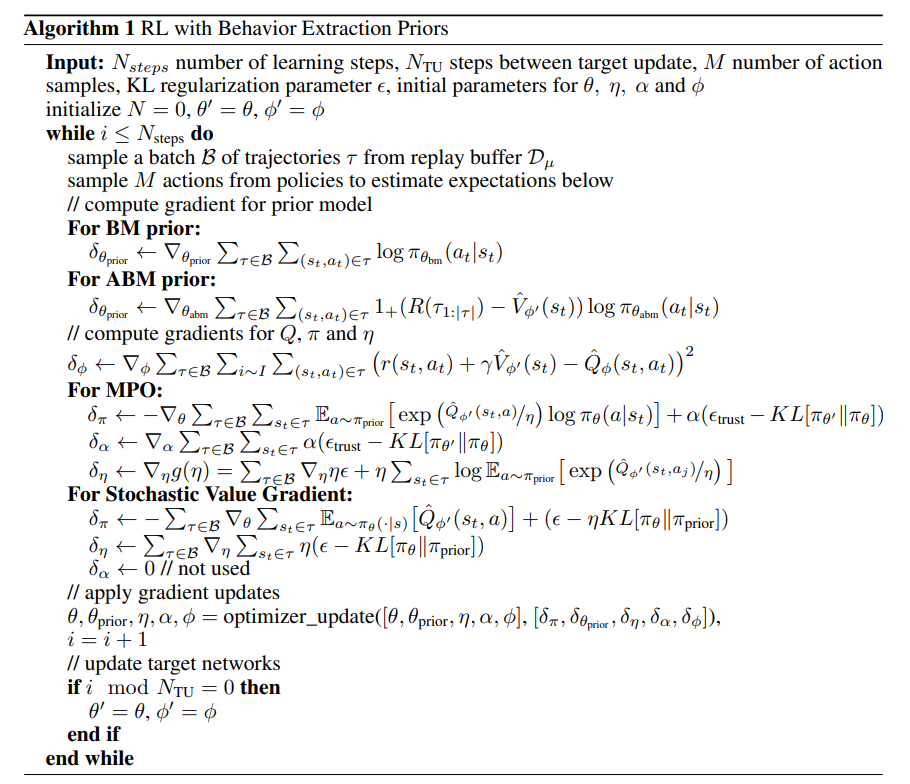
- 算法流程:
5 experiment
实验环境:DeepMind control suite,(multi-task setting)Mujoco 的 Sawyer robot arm(以及对应的真机)。
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
AI大数据分析对安全隐私的保护非常重要。随着大数据技术和人工智能的发展,个人和企业的数据越来越容易被收集和分析。这种数据分析可以为企业提供有价值的洞察和决策支持,但同时也带来了安全隐私的风险。 首先,个人隐私是每个人的基本权利,保护个人隐私是法律和道德的要求。…
