
系列文章目录
- ros2与windows入门教程-windows上安装ROS2 foxy
- ros2与windows入门教程-控制小乌龟
- ros2与windows入门教程-监听和发布话题
- ros2与windows入门教程-编译ROS2包
- ros2与windows入门教程-ROS2 导航Navigation2
- ros2与windows入门教程-修改域Domain_ID
- ros2与windows入门教程-控制walking机器人移动
- ros2与windows入门教程-创建工作空间和功能包
- ros2与windows入门教程-使用rviz2
- ros2与windows入门教程-slam_toolbox算法建图
- ros2与windows入门教程-融合建图和导航
说明:
- 介绍如何在windows ROS2上控制小乌龟
步骤:
- 新打开一个cmd命令提示符窗口,使用call命令设置环境
call C:optrosfoxyx64local_setup.bat- 打开小乌龟示例
ros2 run turtlesim turtlesim_node- 如果小乌龟成功启动,终端将显示以下内容
[INFO] [1653896660.703960000] [turtlesim]: Starting turtlesim with node name /turtlesim
[INFO] [1653896660.708254800] [turtlesim]: Spawning turtle [turtle1] at x=[5.544445], y=[5.544445], theta=[0.000000]- 再打开一个cmd命令提示符窗口,使用call命令设置环境
call C:optrosfoxyx64local_setup.bat- 键盘控制
ros2 run turtlesim turtle_teleop_key- 如果文件成功启动,终端将显示以下内容
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.
Use G|B|V|C|D|E|R|T keys to rotate to absolute orientations. 'F' to cancel a rotation.
'Q' to quit.- 分别按 ↑ 、↓ 、← 、→ 键进行控制机器人,分别按G 、 B 、 V 、 C 、 D 、 E 、R 、T键进行控制机器人转到特定方向
↑ 是向前走
↓ 是向后走
← 是向左转
→ 是向右转
G 是转向东方
B 是转向东南方
V 是转向南方
C 是转向西南方
D 是转向西方
E 是转向西北方
R 是转向北方
T 是转向东北方
F 是停止转动
Q 是退出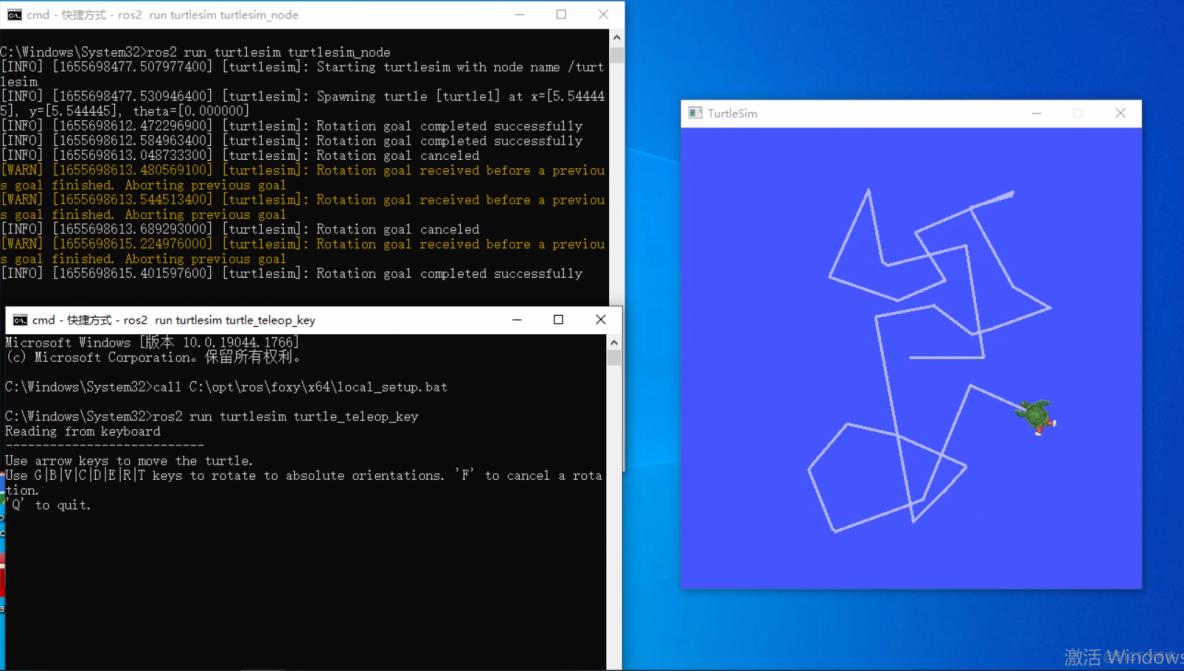
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.e1idc.net
