
一、基本信息
- 开发板:RV1126
- linux版本:4.19.111
- 显示屏:HX070JGI50(7寸)
- 显示器分别率:1024 * 600
二、MIPI协议
-
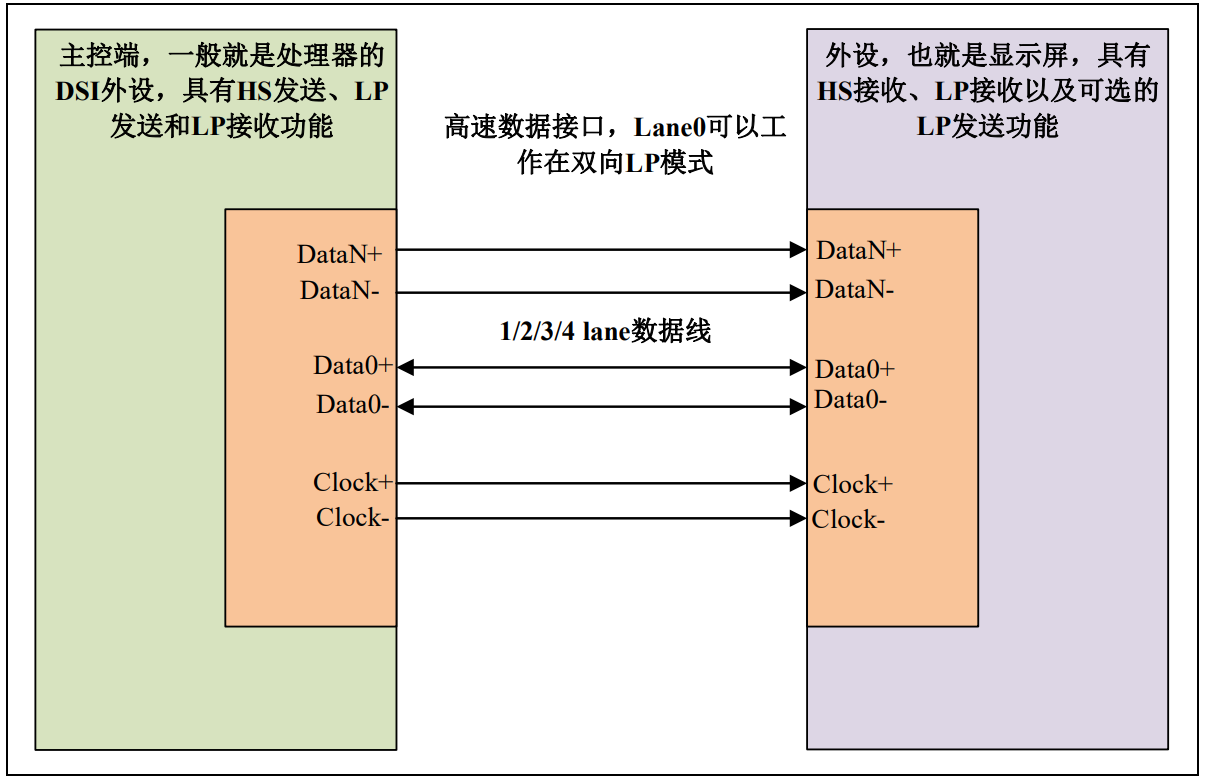
连接示意图(图片来源,正点资料)
-
MIPI DSI 分层
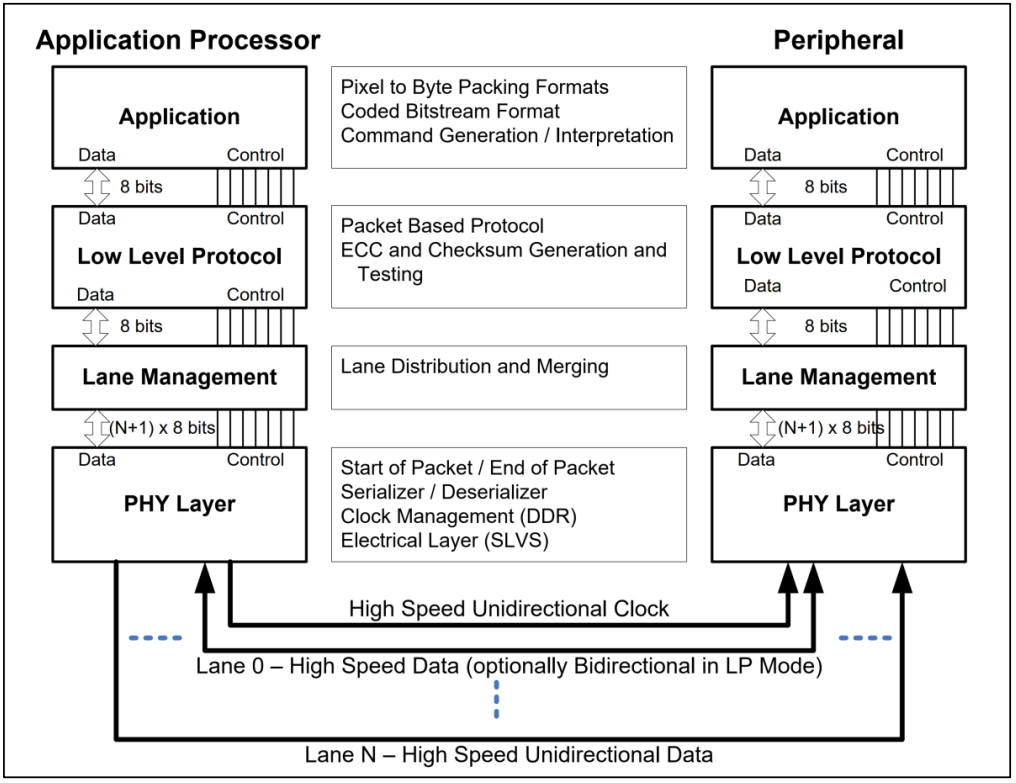
注意: 屏幕,应用层有 DCS,协议层主要有 DSI,物理层有 A-PHY、C-PHY、D-PHY
-
数据发送和接收示意图
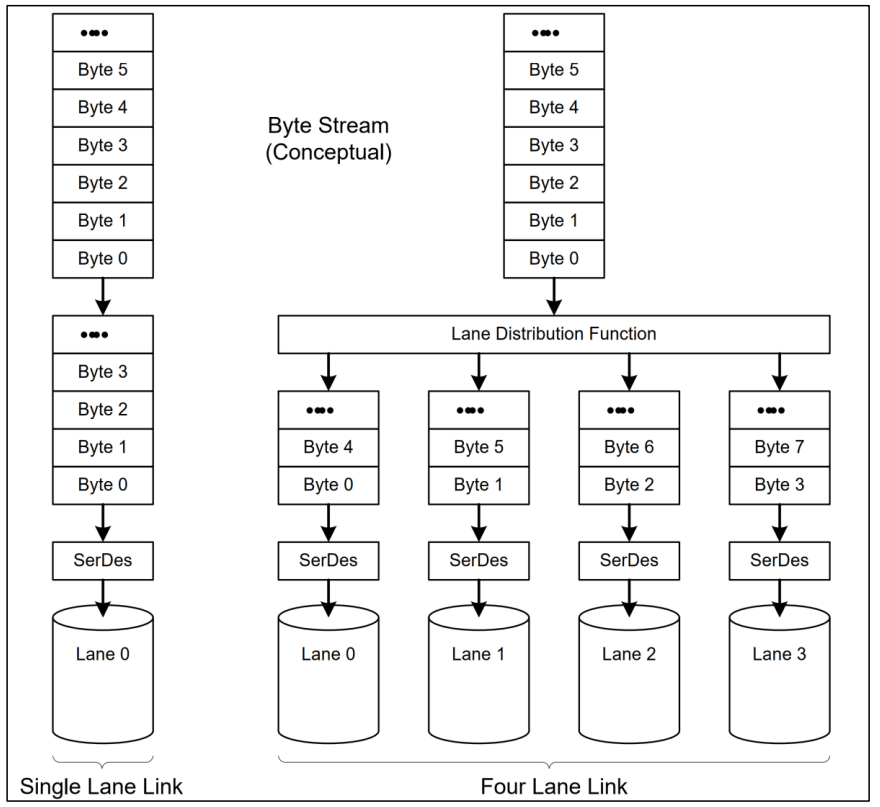
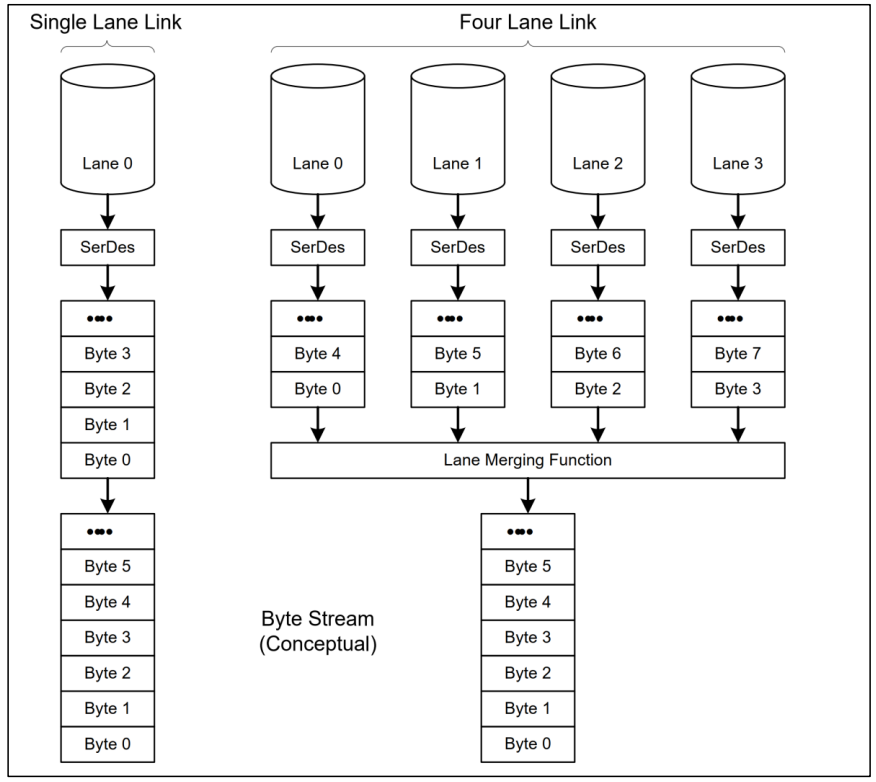
注意: 多 lan 通信数据非整数倍传输时,没数据的 lan 通道先进入 EoT 模式。
-
通道 lan 模块
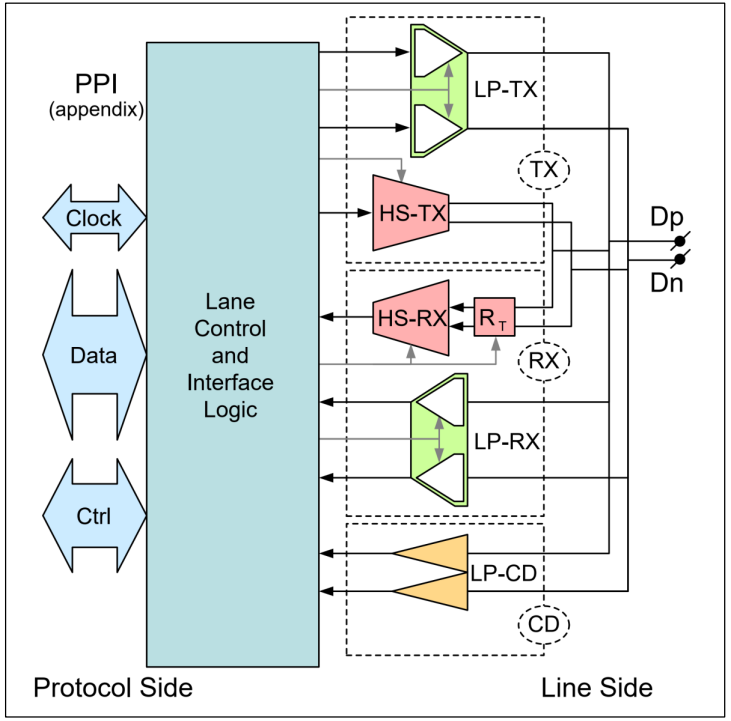
注意: 实际的 Lane 模块是图中简化而来的,其中高速收发器有 HS-TX、HS-RX,低速收发器有 LP-RX 和 LP-TX,以及一个低速竞争检测器 LP-CD,对于高速单向数据通道,可能只有 HS-TX 或者 HS-RX
-
D-PHY 信号电平
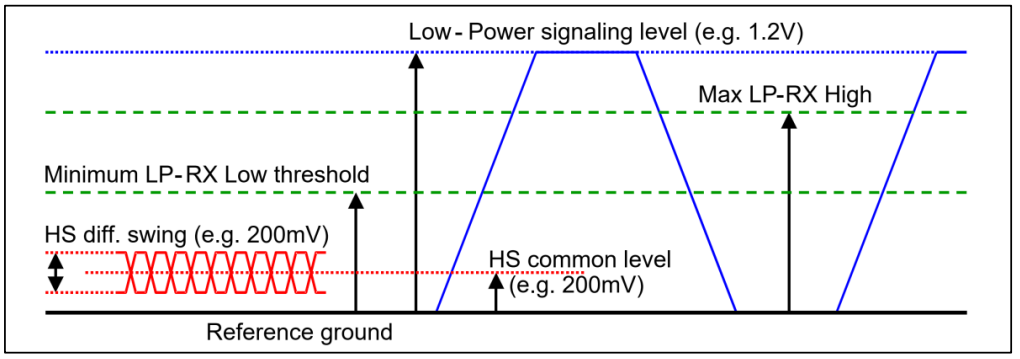
注意: 图中蓝色实线是 LP 模式下的信号波形示例,电压为 0~1.2V。绿色虚线是 LP 模式下信号的高低电平门限。红色实线是 HS 模式下的信号波形示例,中心电平 200mV
-
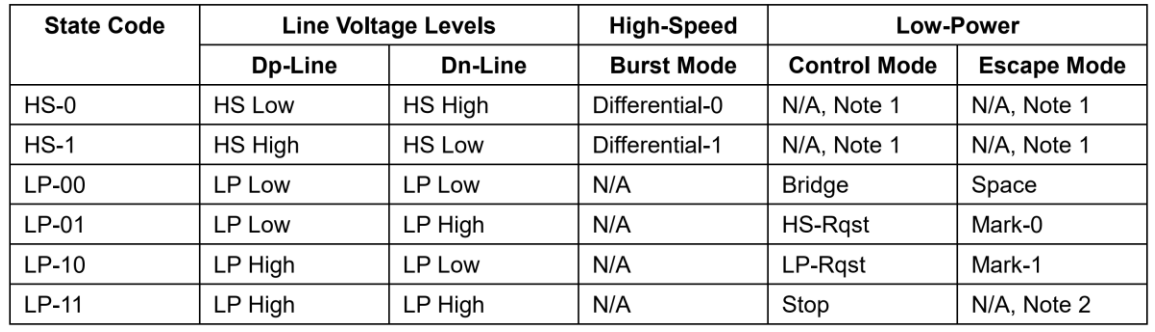
通道状态
-
HS 模式采用差分信号,所以只有两种状态:
HS-0: 高速模式下 Dp 信号低电平,Dn 信号高电平的时候。
HS-1: 高速模式下 Dp 信号高电平,Dn 信号低电平的时候。 -
LP 模式下有两根独立的信号线驱动,所以有 4 个状态:分别是: LP-00、LP-01、LP-10、LP-11
-
-
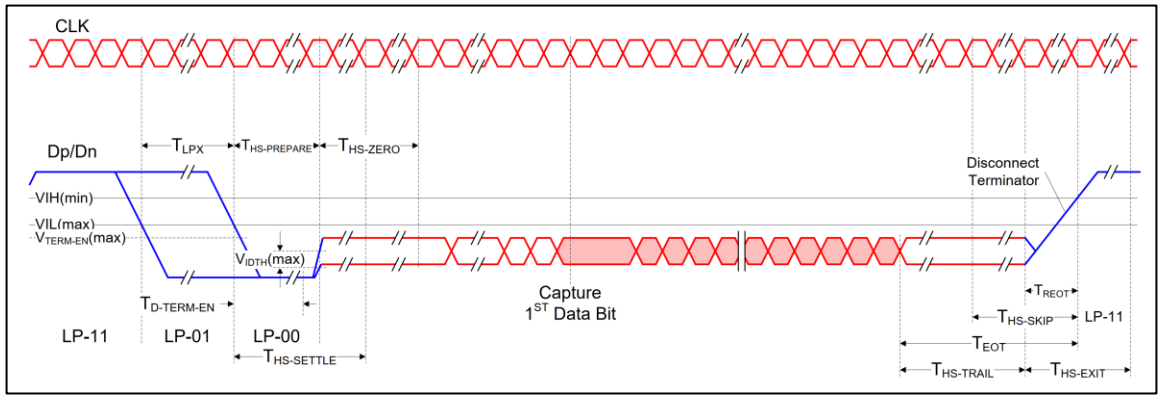
数据 Lane 三种工作模式
D-PHY 协议规定了,通过 Lane 的不同状态转换有三种工作模式:控制模式、高速模式和 Escape 模式。控制模式和 Escape 模式都属于 LP,高速模式属于 HS。正常情况下,数据 Lane 工作在控制模式或者高速模式下-
控制模式
这个我也不清楚,据说 LAN 复位后,数据通道处于 control 模式(LP-11)。其他模式都是开始或者结束于control模式。常见的如 HS-Rqst,LP-Rqst,STOP -
高速模式
-
Escape 模式
对于数据 Lanes,进入 Escape 模式以后,应该紧接着发送一个 8bit 的命令来表示接下来要做的操作,命令如图所示
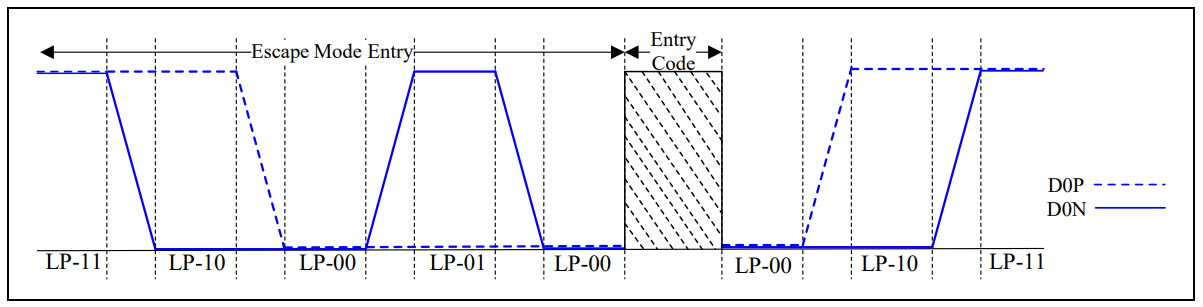

注意: 低 bit 先发送,所以对应的十六进制就是 0X87(0X10000111)Escape 模式下发送这三服务器托管网个命令的时序图如图 24.3.4.4 所示:

-
三、LCD 屏幕概念
-
名词含义
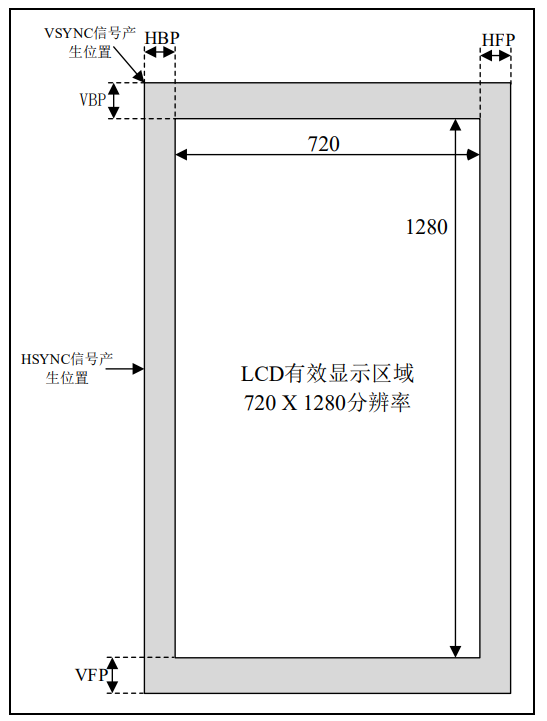
缩写 英文全称 含义 HSYNC Horizontal Sync 水平同步 HLW/HPW Horizontal Low Pulse Width 水平同步信号宽度 HSA Horizontal Sync Active 水平同步有效 HSS Horizontal Sync Start 水平同步开始 HSE Horizontal Sync End 水平同步结束 HBP Horizontal Back Porch 水平后肩 HFP Horizontal Front Porch 水平前肩 HACT Horizontal Active 水平有效区域,也就是屏幕有效宽度 VSYNC Vertical Sync 垂直同步 VLW/VPW Vertical Low Pulse Width 垂直同步信号宽度 VSA Vertical Sync Active 垂直同步信号宽度 VSS Vertical Sync Start 垂直同步开始 VSE Vertical Sync End 垂直同步结束 HBP Vertical Back Porch 垂直后肩 VACT Vertical Active 垂直有效区域,也就是屏幕有效高度 VFP Vertical Front Porch 垂直前肩 RGB — 在这服务器托管网里指 RGB 原始像素数据流 LPM Low Power Mode 低功耗模式 BLLP Blanking or Low-Power periods 没有包含有效数据的数据包或者进入 LP 模式下的状态,称为 BLLP -
video 和 command 模式
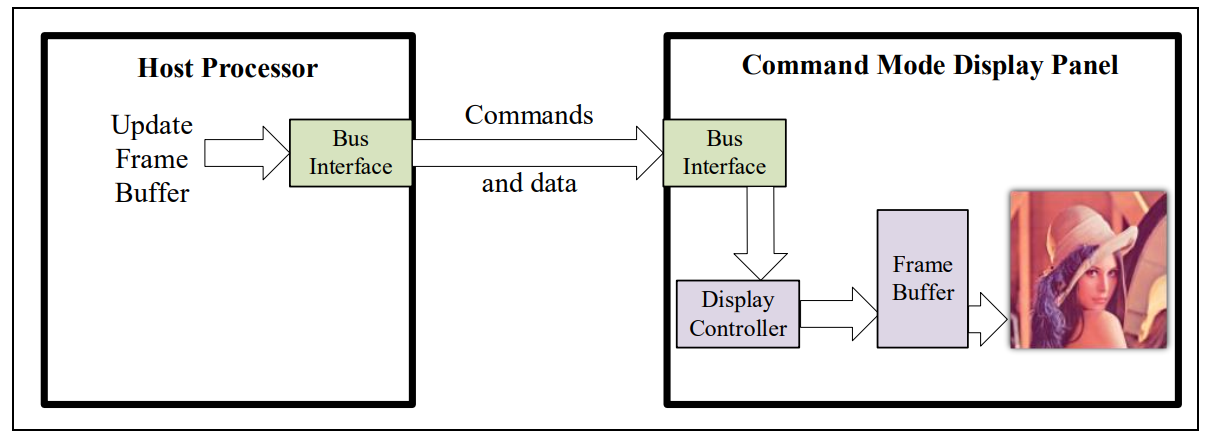
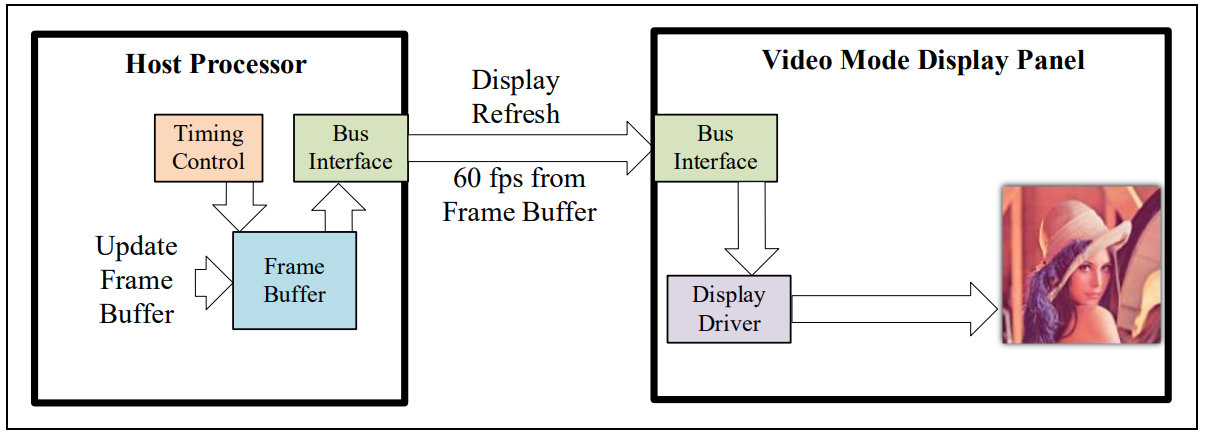
简单来说,就是显示器有中有无缓冲区,有缓冲区时是 command 模式,刷新时直接从缓冲区获取刷新,通过命令更改缓冲区内容;无缓冲区时是 video 模式,所有数据都是从通道中获取刷新-
command 模式
-
video 模式
-
-
LCD 显示结构
-
长短数据包
-
长数据包
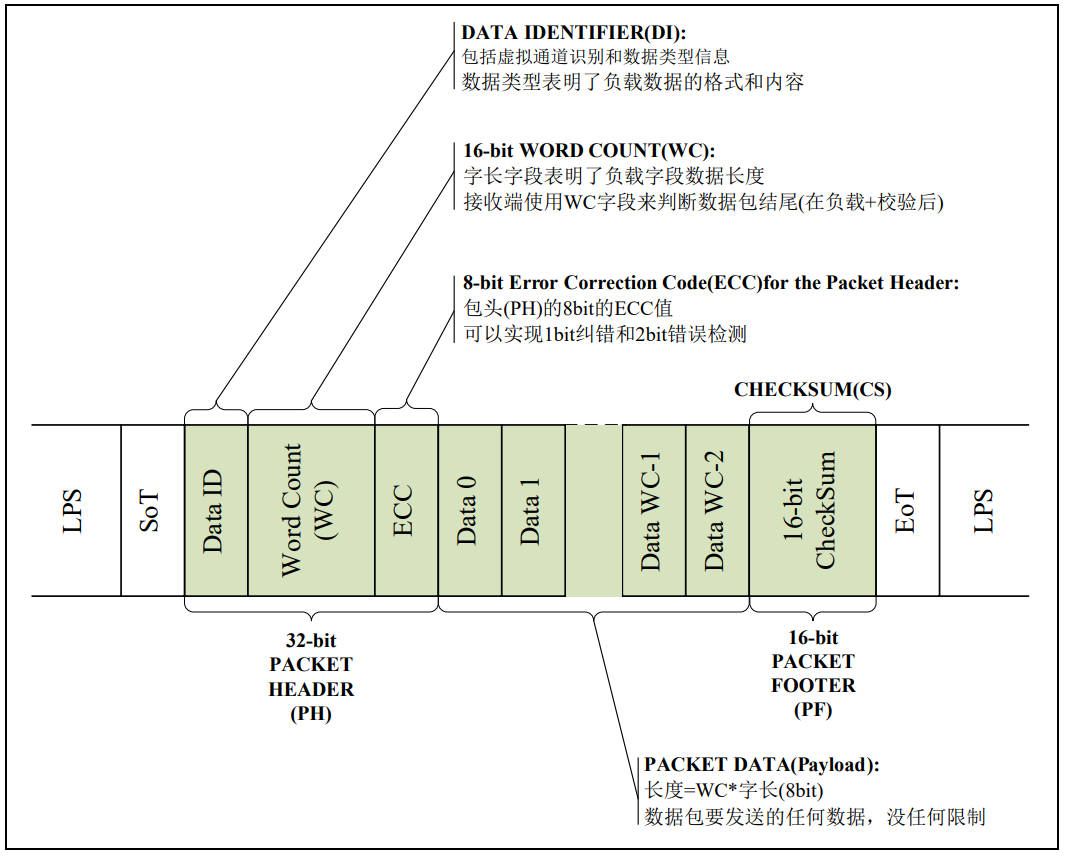
图中绿色的部分就是长包结构,长包有 3 部分:32-bit 的 PH(包头)、用于自定义的负载数据、16-bit 的包尾(PF)。PH 有 3 部分:8-bit 的 DI,16-bit 的 WC 以及 8-bit 的 ECC。PF 只有 1 部分:16-bit 的校验和,因此长包数据长度范围是 6~65541 个字节。 -
短数据包
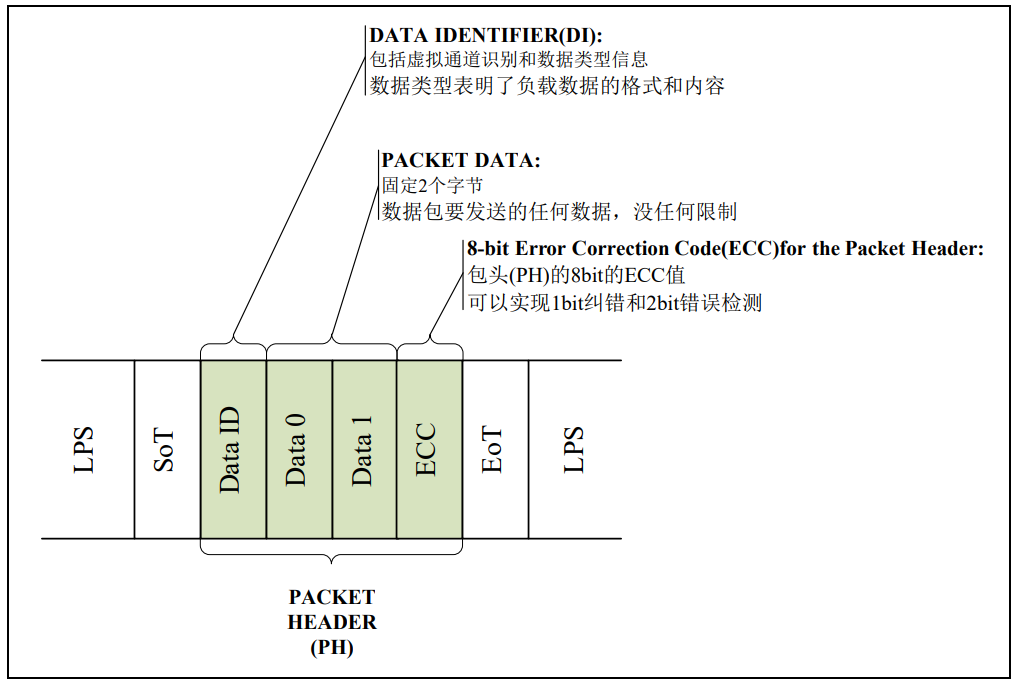
图就是短数据包结构,只有一个 PH(包头),PH 分为 3 部分:和长数据包一样,第 1 个就是 8-bit 的 DI 域;接下来是 2 个字节的数据负载域,也就是用户要实际发送的内容;最后是一个 8-bit 的 ECC 域,可以实现 1bit 纠错,2 比特错误检测
-
-
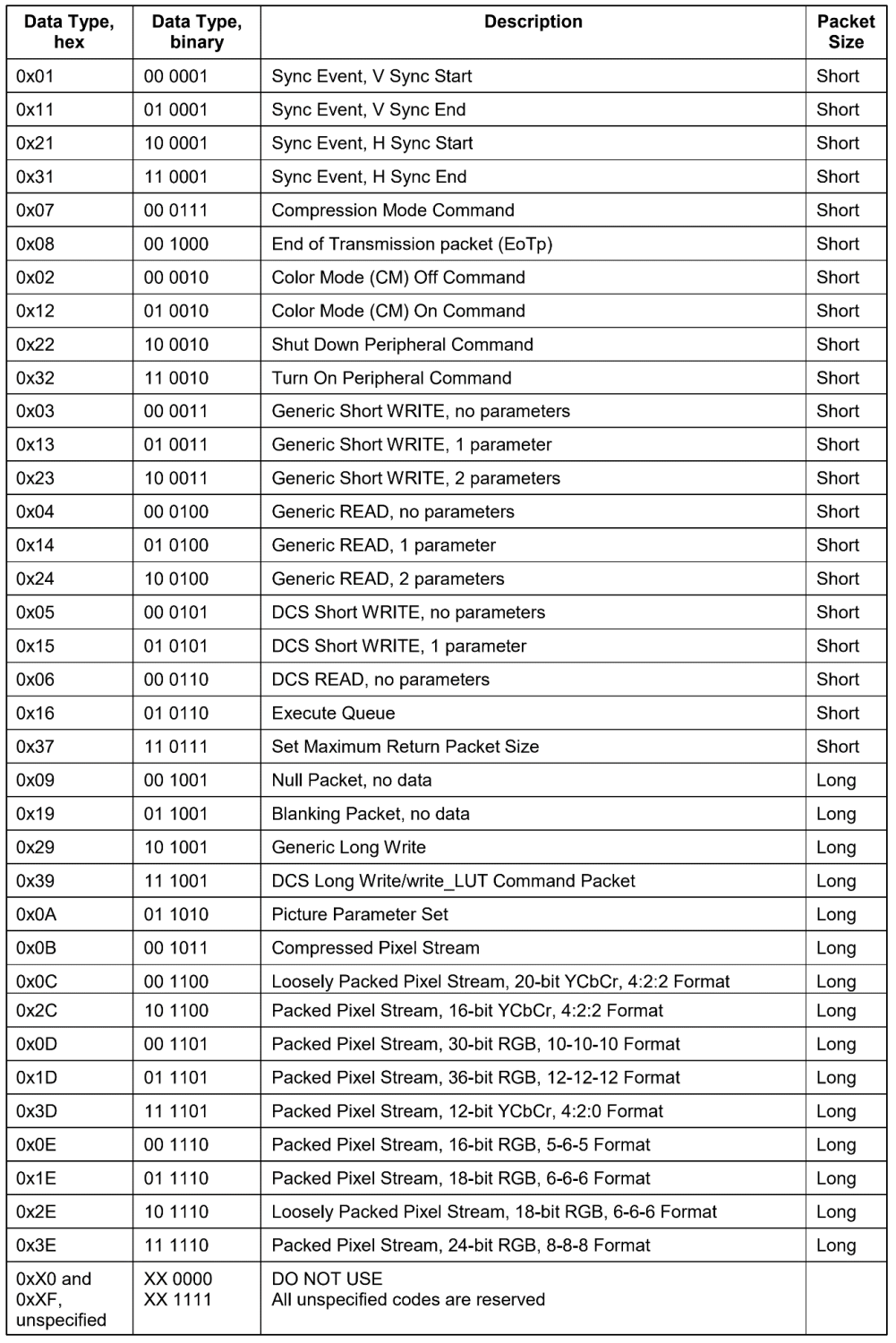
常用指令
-
MIPI DSI 时钟计算

注意:一般说的 MIPI DSI 时钟要在这个时间测量到的频率上乘以 2,因为双边沿采集,
实际的屏幕帧率肯定到不了 60fps,网上有些资料说对于瑞芯微的平台,实际设置的 MIPI DSI 速度是理论的 1.2 倍即可,所以对于 rv1126 来说还需要在时钟上 * 1.2。
四、DSI 调试
弄明白上面的知识点后,调试 DSI 相对就比较简单了,有不明白的地方可以参考正点的教程和瑞芯微的手册已经MIPI协议文档,这里我只是做一个总结,便于自己在调试的时候好查找资料
-
设备树
&dsi { status = "okay"; // rockchip,lane-rate = ; panel@0 { compatible = "ilitek,ili9881d", "simple-panel-dsi"; reg = ; backlight = ; power-supply = ; prepare-delay-ms = ; reset-delay-ms = ; init-delay-ms = ; disable-delay-ms = ; unprepare-delay-ms = ; width-mm = ; height-mm = ; // reset-gpios = ; dsi,flags = ; dsi,format = ; dsi,lanes = ; panel-init-sequence = [ 15 00 02 80 8B 15 00 02 81 78 15 00 02 82 84 15 00 02 83 88 15 00 02 84 A8 15 00 02 85 E3 15 00 02 86 88 ]; display-timings { native-mode = ; timing0: timing0 { clock-frequency = ; hactive = ; vactive = ; hback-porch = ; hfront-porch = ; hsync-len = ; vback-porch = ; vfront-porch = ; vsync-len = ; hsync-active = ; vsync-active = ; de-active = ; pixelclk-active = ; }; }; ports { #address-cells = ; #size-cells = ; port@0 { reg = ; panel_in_dsi: endpoint { remote-endpoint = ; }; }; }; }; ports { #address-cells = ; #size-cells = ; port@1 { reg = ; dsi_out_panel: endpoint { remote-endpoint = ; }; }; }; };注意: lane-rate 不配置时,时钟在驱动中会自动计算,所以多事情况下都会屏蔽即可
-
设备树修改说明
看着设备说的信息很多,不要怕,其实很简单,对应的注释这里我就不详细说明了,网上也有很多博客介绍,此笔记主要是记录流程以及遇到的一些问题 -
clock-frequency 计算
clock-frequency = 水平总周期 * 垂直总周期 * 帧率(取一个相近值即可) clock-frequency = (hactive + hback-porch + hfront-porch + hsync-len) * (vactive + vback-porch + vfront-porch + vsync-len) * fps -
文档位置
-
Kernel (develop-4.4)
drivers/gpu/drm/rockchip/dw-mipi-dsi.c
drivers/phy/rockchip/phy-rockchip-inno-video-combo-phy.c
Documentation/devicetree/bindings/display/rockchip/dw_mipi_dsi_rockchip.txt
Documentation/devicetree/bindings/phy/phy-rockchip-inno-video-combo-phy.txt -
U-Boot (next-dev)
drivers/video/drm/dw_mipi_dsi.c
drivers/video/drm/inno_video_combo_phy.c -
U-boot (rkdevelop)
drivers/video/rockchip-dw-mipi-dsi.c
drivers/video/rockchip-inno-mipi-dphy.c
注意: 一般调试 DSI 不用修改驱动文件,只需要修改设备树即可
-
-
确认驱动加载
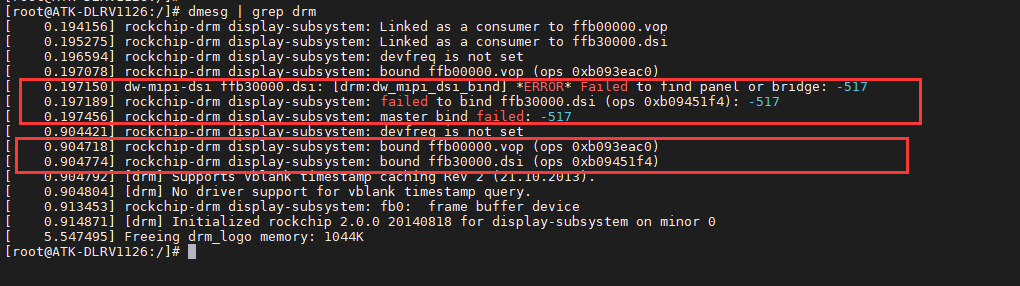
注意: Drm 驱动的加载存在依赖关系,所以可能会多次因为驱动资源暂时获取不到而返回 -EPROBE_DEFER(-517),但是只要配置正确,待相关组件驱动能够完整获取到资源后,最终就会 bound 成功。 -
当前显示信息

-
查看 LCD 信息

五、调试问题
-
不论修改设备树中的说明内容,显示屏都无明显变化
解决办法:可能是设备树不是当前使用的 -
左半边花屏
解决办法:检查设备树配置的尺寸,降低时钟 -
横竖屏转换
解决办法:这个需要注意 LCD 的扫描方式,有的 LCD 可能是通过命令配置,有的可能是通过硬件配置。
参考资料
- 【正点原子】ATK-DLRV1126嵌入式Linux驱动开发指南V1.2.pdf
- Rockchip_DRM_Panel_Porting_Guide_V1.6_20190228.pdf
- MIPI DSI Specification_v1-3.pdf
- Linux MIPI DSI驱动调试笔记-LCD时序参数配置(三):https://developer.aliyun.com/article/1326393
- LCD之mipi DSI接口驱动调试流程:https://blog.csdn.net/qq_33003441/article/details/82492763
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
机房租用,北京机房租用,IDC机房托管, http://www.fwqtg.net
通常页面的组成是非常复杂的,有的页面里要实现一些复杂的动画效果,比如点击菜单时弹出菜单的动画特效,滚动鼠标滚轮时页面滚动的动画效果,当然还有一些炫酷的 3D 动画特效。如果没有采用分层机制,从布局树直接生成目标图片的话,那么每次页面有很小的变化时,都会触发重排…
