
首先,成功安装ros2环境,参考官方文档中的教程,能用运行出来此处的代码
Writing a simple publisher and subscriber (Python) — ROS 2 Documentation: Iron documentation
下载vscode,进行远程开发,具体参考:Vscode进行远程开发-CSDN博客
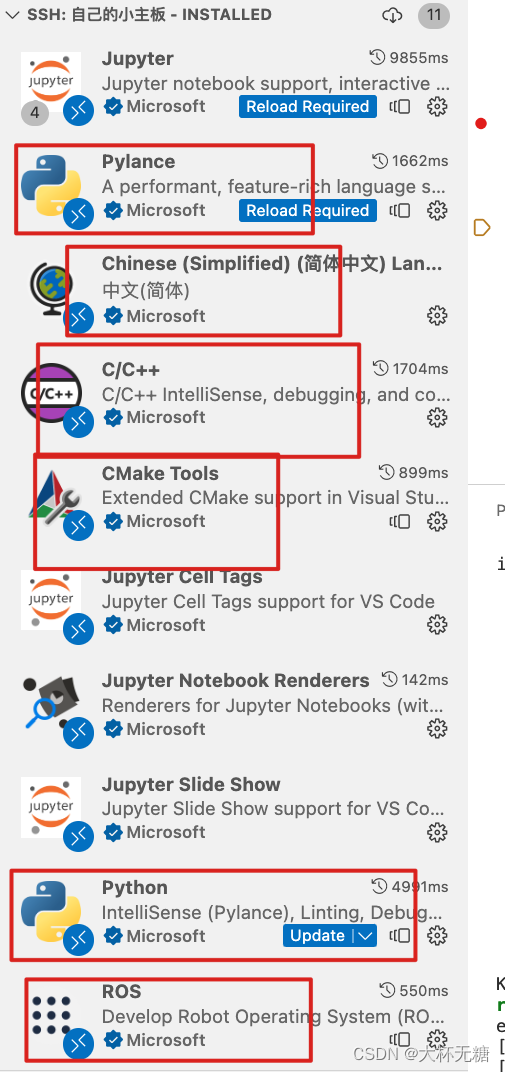
在vscode中安装调试ros2所需要的插件,有Python、Pylance、C/C++、CMake Tools、ROS
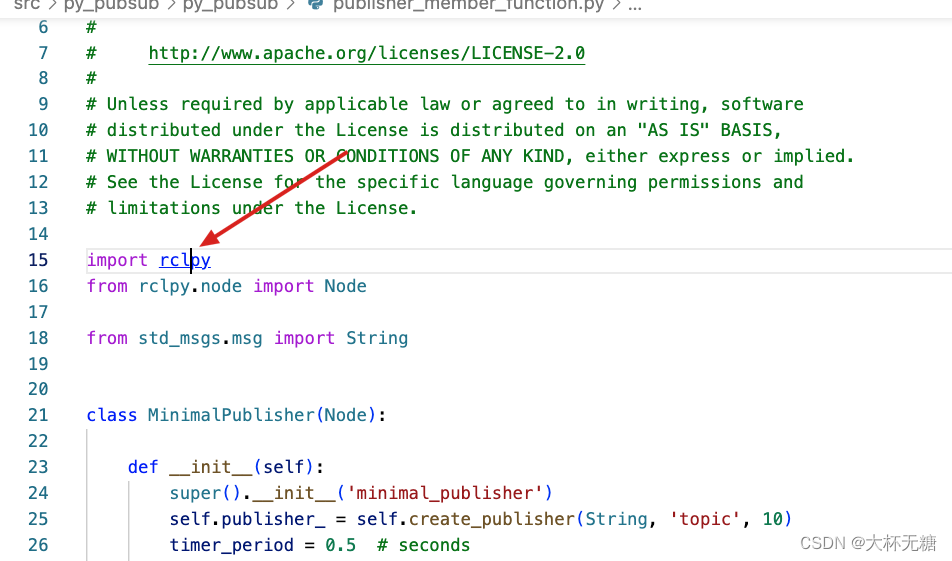
这些插件安装完成之后,我们已经可以在Vscode中自由跳转Python代码和Ros环境中的服务器托管网rclpy包了
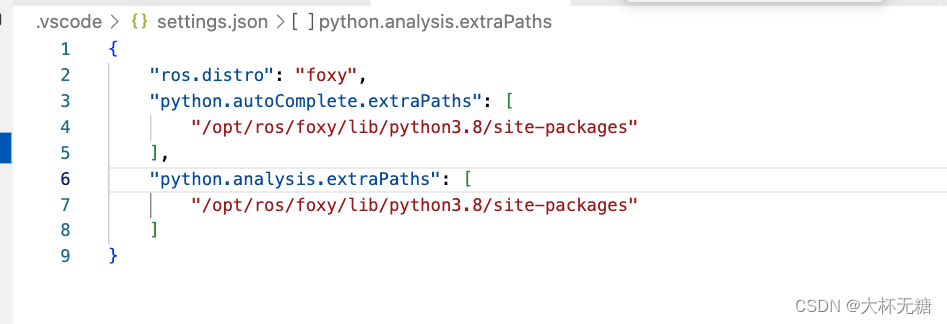
之所以能跳转ros环境的包,是因为我们项目文件夹下面的./vscode中setting服务器托管网s.json中成功导入了ros环境的位置
除了.settings.json文件夹,安装Ros插件后,.vscode文件中会自动有一个c_cpp_properties.json文件,里面也是已经自动填充了内容

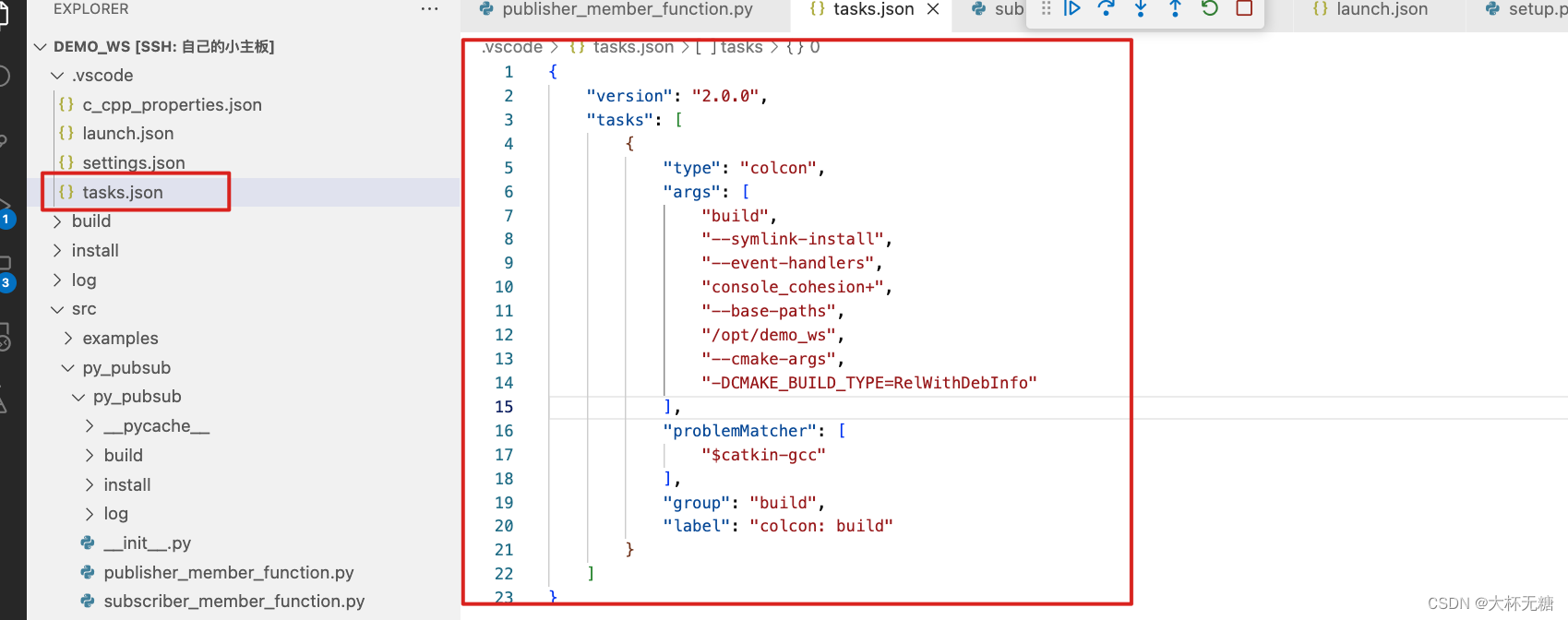
接下来在.vscode中创建tasks.json文件
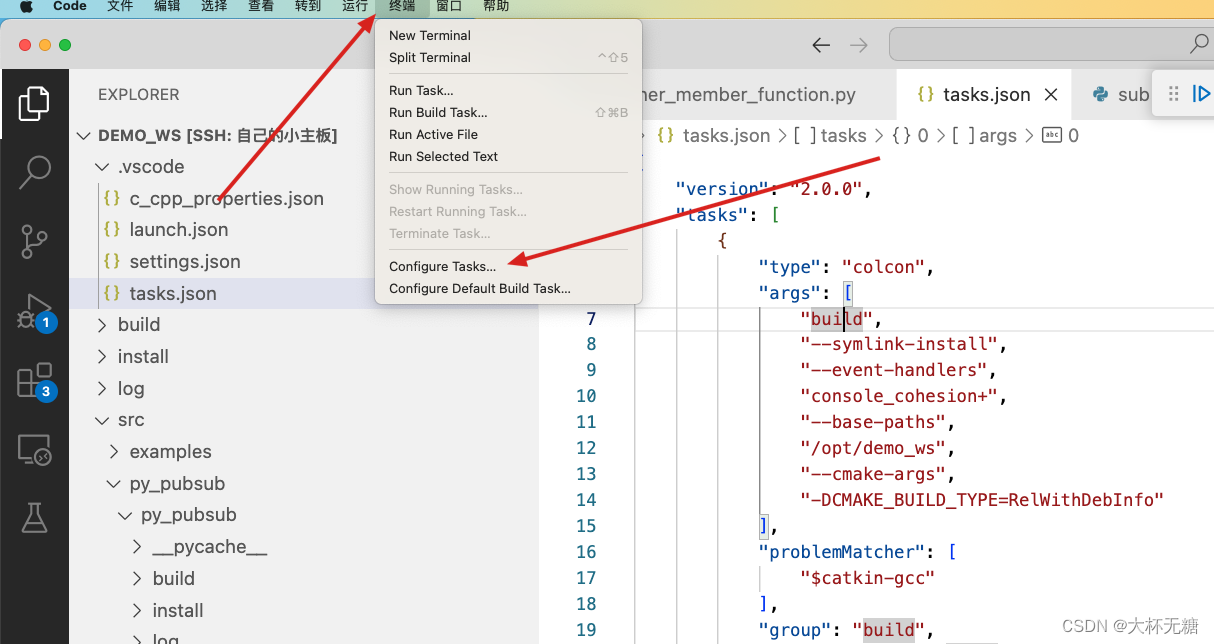
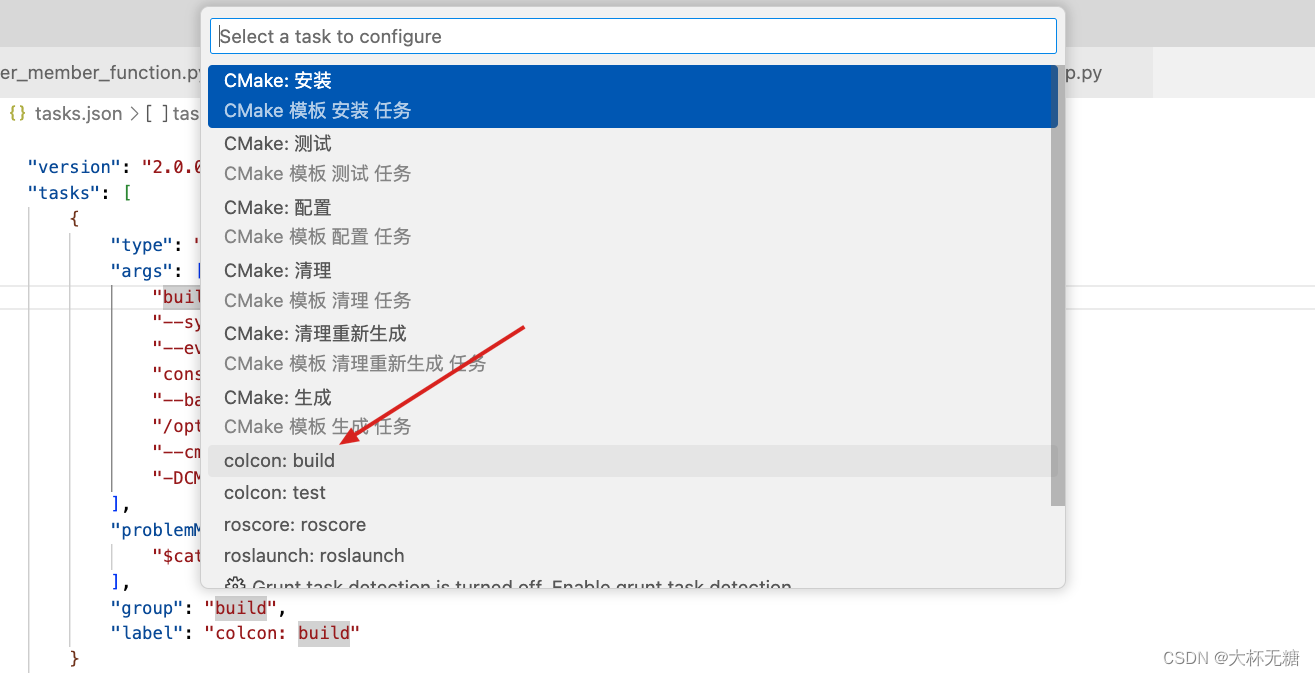
会自动生成tasks.json文件,并且插入内容
然后继续在.vscode创建一个文件launch.json文件
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
// Example launch of a python file
{
"name": "Launch",
"type": "python",
"request": "launch",
"program": "/opt/demo_ws/src/py_pubsub/py_pubsub/publisher_member_function.py", #注意此处改成你自己的要调试的文件路径
"console": "integratedTerminal",
},
// Example gdb launch of a ros executable
{
"name": "(gdb) Launch",
"type": "cppdbg",
"request": "launch",
"program": "/opt/demo_ws/py_pubsub/lib/py_pubsub/talker",#此处暂时不太清楚
"args": [],
"stopAtEntry": true,
"cwd": "/opt/demo_ws",
"externalConsole": false,
"MIMode": "gdb",
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
]
}
],
"inputs": [
{
"id": "package",
"type": "promptString",
"description": "Package name",
"default": "learning_ros2"
},
{
"id": "program",
"type": "promptString",
"description": "Program name",
"default": "ros2_talker"
}
]
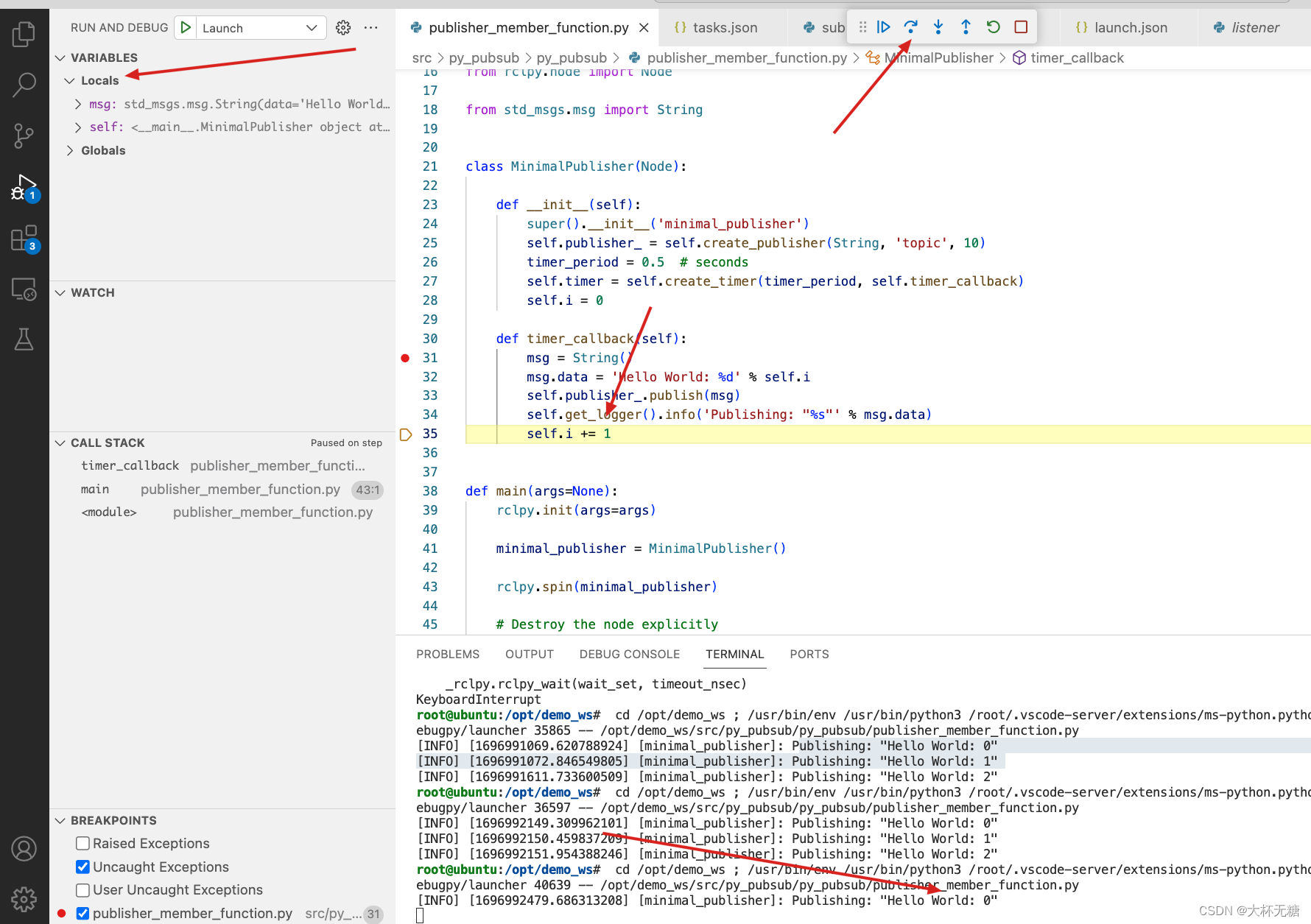
}我们目前只能调试python文件,无法调试 ros executable 。打上断点,即可调试了
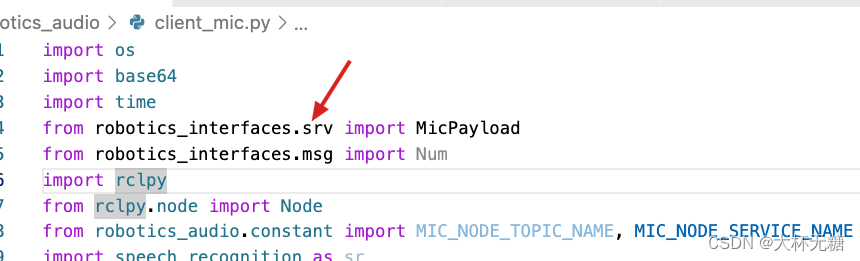
还有一个问题是:
没有办法调试srv和msg,目前需要解决一下
服务器托管,北京服务器托管,服务器租用 http://www.fwqtg.net
相关推荐: OpenSergo & Dubbo 微服务治理最佳实践
高春辉、王春生、朱峰:关于开源创业的15件小事 01 Why 微服务治理? 现代的微服务架构里,我们通过将系统分解成一系列的服务并通过远程过程调用联接在一起,在带来一些优势的同时也为我们带来了一些挑战。 如上图所示,可以看到词云中所展示的都是目前微服务架构在生…
